【求助帖】RoboRTS中怎么添加可移动的障碍物?
HHL
1004
0
0
2020-03-04
在官方的代码中,仿真只能实现一辆车的路径规划。我想实现一个可以移动的障碍物来描述在场地上的机器人,请问该如何实现?(萌新入门不久,希望能详细一点)
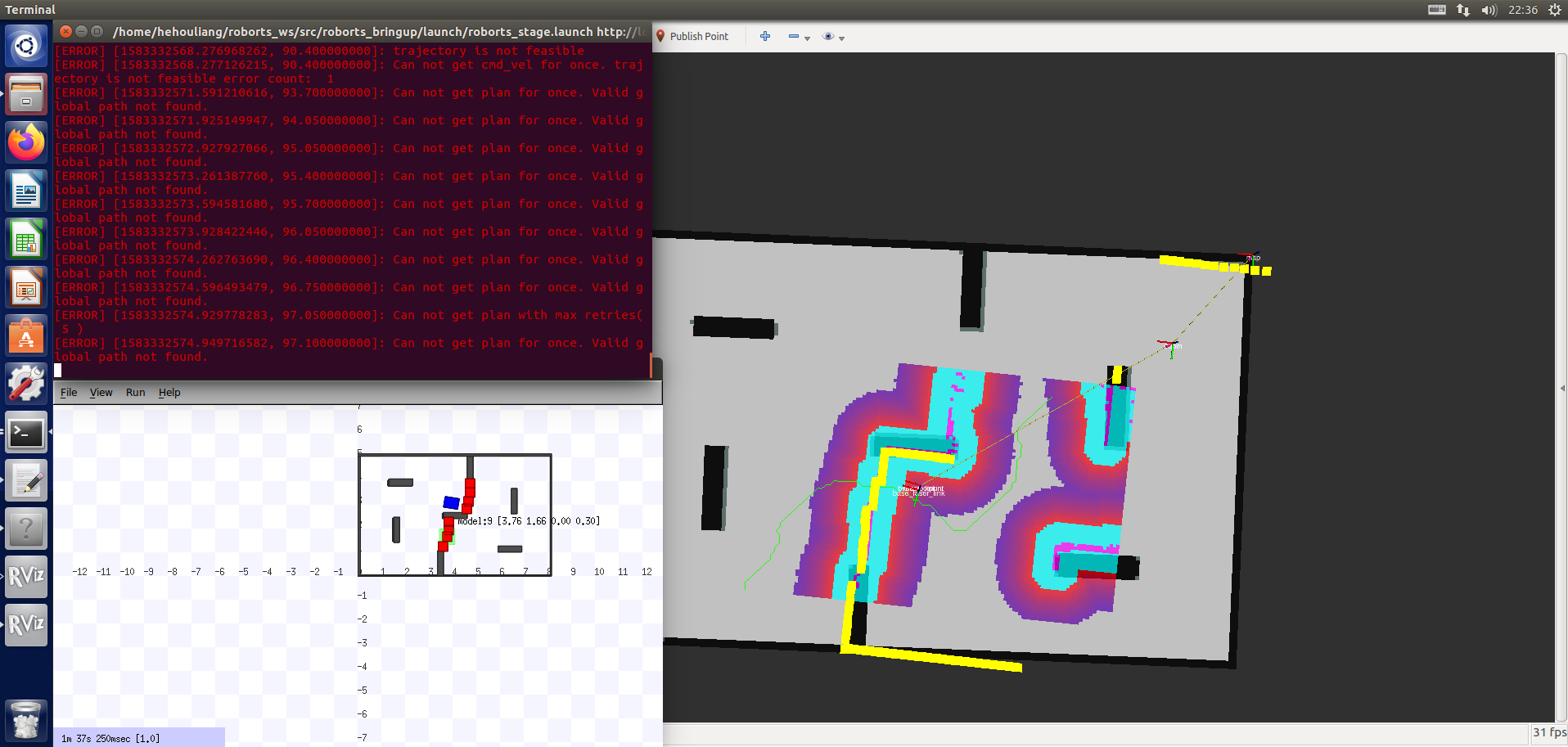
此外,我看到官方的bring_up_stage仿真程序中,可以通过.world文件添加障碍物,但我不知道这句简简单单的 block(pose[7.79 3.45 0 0.3] color "red" 的背后有哪些函数在实现它,
而且这个障碍物不能自主移动,也不能被提前感知(如附件的截图,我把路都封死了它还是会义无反顾的规划明明有障碍物的路线。)。
此外,我看到官方的bring_up_stage仿真程序中,可以通过.world文件添加障碍物,但我不知道这句简简单单的 block(pose[7.79 3.45 0 0.3] color "red" 的背后有哪些函数在实现它,
而且这个障碍物不能自主移动,也不能被提前感知(如附件的截图,我把路都封死了它还是会义无反顾的规划明明有障碍物的路线。)。
文章标签
请问这篇文章对你有用吗?
【求助帖】RoboRTS中怎么添加可移动的障碍物?