Timer就是定时器,但是与一般我们生活中使用的定时器不同的是,Timer的单位不是s秒,而是Hz赫兹,而且通常是MHz(1,000,000Hz),定时器通常从0开始数数,然后直到占满其16位寄存器,就会告诉CPU,“我已经满得不行了~~”,然后从0开始重新计数。
Timer具体的频率多少通常取决于,其Clock Source,Prescaler,和Period
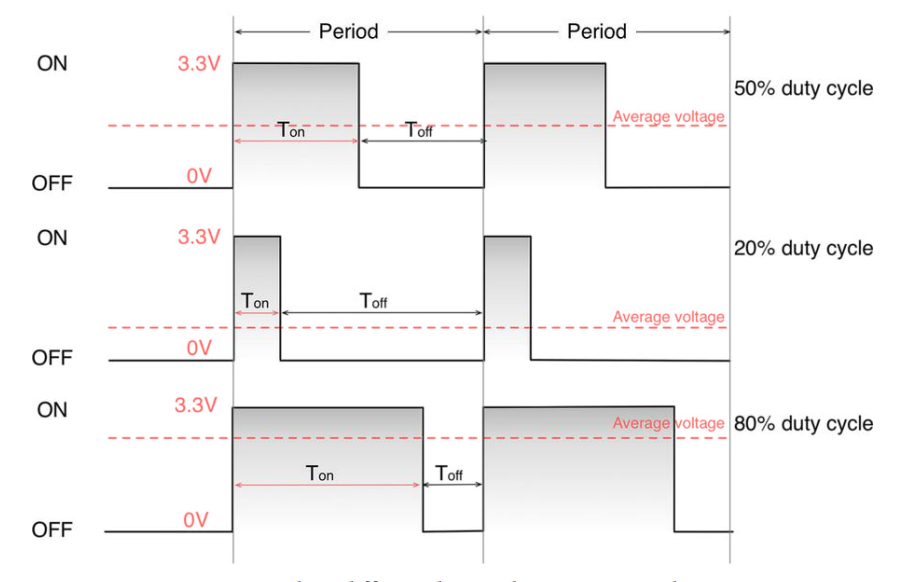
这里值得注意的是,虽然Prescaler和Period都可以降频,但是根据笔者实测,两者是不一样的,Prescaler会改变PWM信号的密度,所以不推荐过大的Prescaler,而Period会改变PWM信号的Resolution清晰度/分辨率,过小会导致能选择的Duty Cycle占空比过少,所以不推荐过小的Period。但是具体怎么平衡选择,其实还是需要看你的需求和设备。
如果是高级定时器,还需要考虑Repetition Counter
定时器分为
- Basic Timer
- TIM6
- TIM7
- General Purpose Timer
- TIM2到TIM5
- TIM9到TIM14
- Advanced Timer
- TIM1
- TIM8
- SysTick Timer
因为RoboMaster暂时只用得上Basic Timer和General Purpose Timer,其他Timer都暂时不讲。在RM中,Basic Timer用于计时,General Purpose Timer用于生成PWM,虽然也可以当成普通的Basic Timer来用。
所有Timer的时钟源分布图
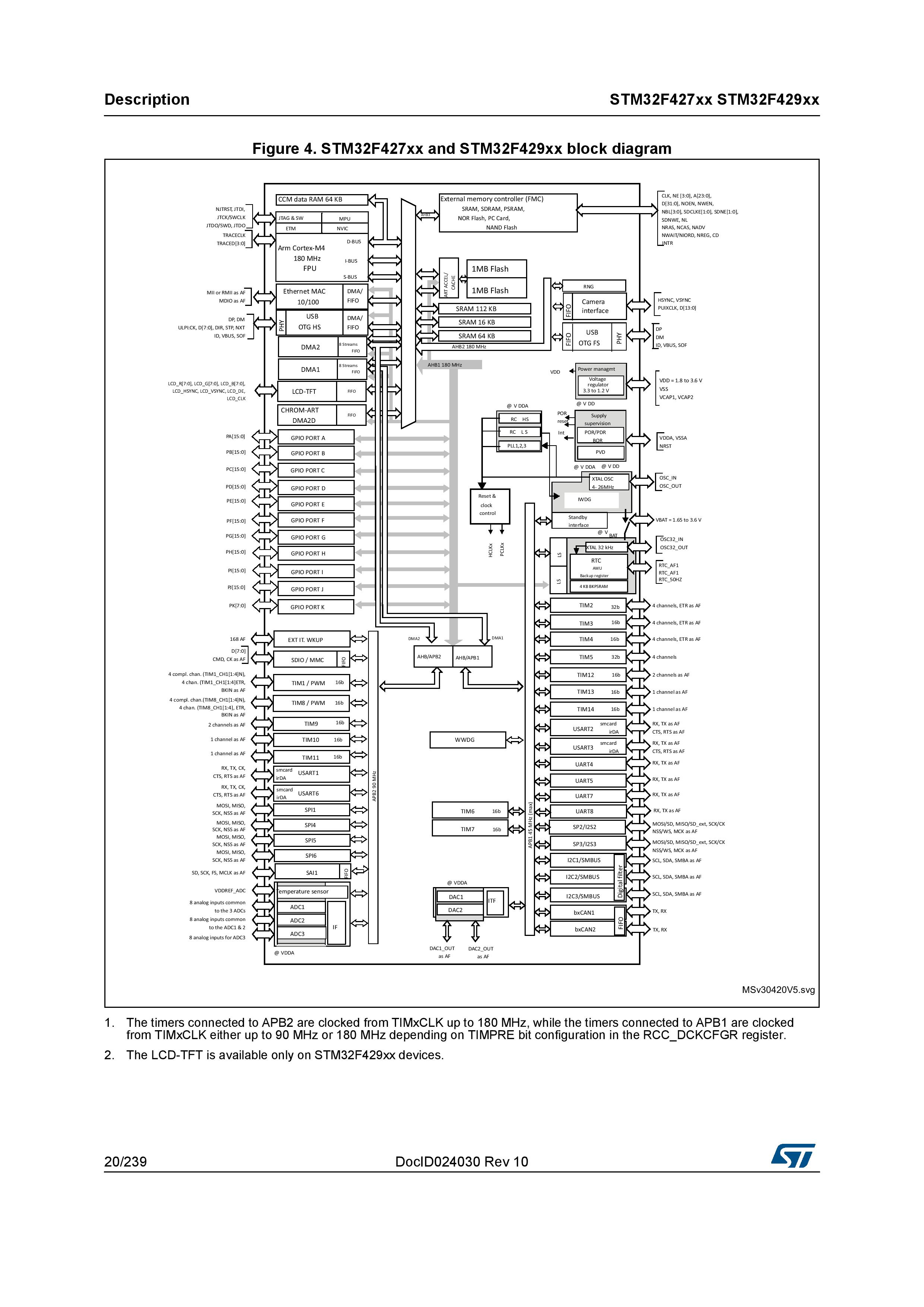
在无法确认某个Timer的时钟源在Clock Tree中的位置时,请参考上图!