中断是指计算机运行过程中,出现某些意外情况需主机干预时,机器能自动停止正在运行的程序并转入处理新情况的程序,处理完毕后又返回原被暂停的程序继续运行。
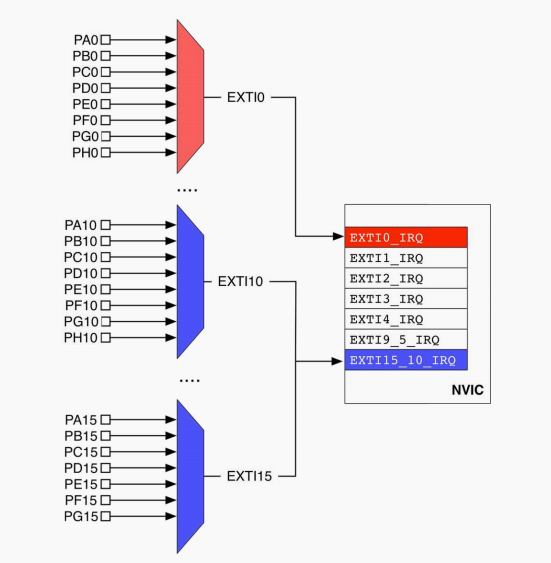
NVIC全称为Nested Vectored Interrupt Controller,是STM32专门划分独立出来的模块,专门负责Interrupt事宜,其中技术细节和使用细节非常冗杂,但是实际在RoboMaster中能使用到的部分却是比较简单的,所以本文也不展开细说。
为使系统能及时响应并处理发生的所有中断,系统根据引起中断事件的重要性和紧迫程度,硬件将中断源分为若干个级别,称作中断优先级。在实际系统中,常常遇到多个中断源同时请求中断的情况,这时MCU必须确定首先为哪一个中断源服务,以及服务的次序。解决的方法是中断优先排队,即根据中断源请求的轻重缓急,排好中断处理的优先次序即优先级( Priority ),又称优先权,先响应优先级最高的中断请求。另外,当MCU正在处理某一中断时,要能响应另一个优先级更高的中断请求,而屏蔽掉同级或较低级的中断请求,形成中断嵌套。
在<项目>/Drivers/STM32F4xx_HAL_Driver/Src的stm32f4xx_hal_gpio.c文件中,我们可以看到其定义复制代码
- __weak void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
- {
- /* Prevent unused argument(s) compilation warning */
- UNUSED(GPIO_Pin);
- /* NOTE: This function Should not be modified, when the callback is needed,
- the HAL_GPIO_EXTI_Callback could be implemented in the user file
- */
- }
这里的__weak指明了,该函数如果没被用户创建,就使用上面的代码被默认创建,而如果用户在main.c中自主创建该函数,则用户创建的函数覆盖默认定义的函数。
| 欢迎光临 RoboMaster (https://bbs.robomaster.com/) | Powered by Discuz! X3.2 |