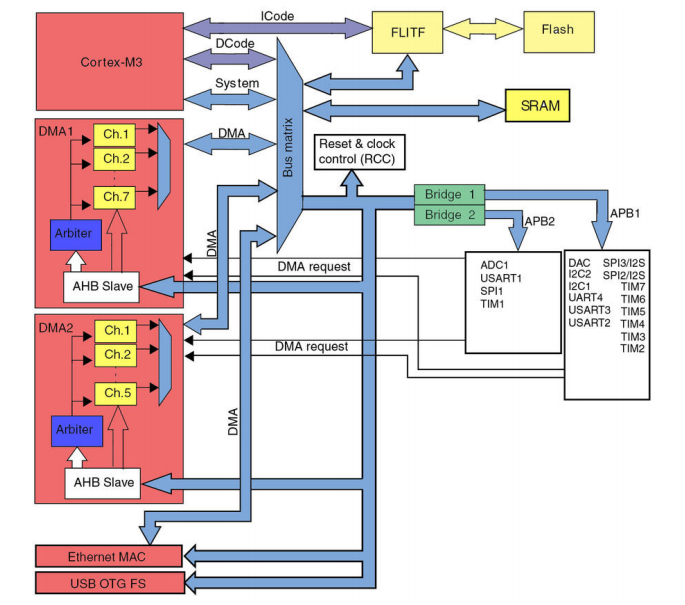
Direct Memory Access:直接存储器访问 是所有现代计算设备的重要特色,它允许不同速度的硬件装置来沟通,而不需要依赖于CPU的大量中断负载。否则,CPU需要从来源把每一片段的资料复制到暂存器,然后把它们再次写回到新的地方。在这个时间中,CPU对于其他的工作来说就无法使用。DMA传输将数据从一个地址空间复制到另外一个地址空间。当CPU初始化这个传输动作,传输动作本身是由DMA控制器来实行和完成。典型的例子就是移动一个外部内存的区块到芯片内部更快的内存区。像是这样的操作并没有让处理器工作拖延,反而可以被重新排程去处理其他的工作。DMA传输是高效能嵌入式系统算法和网络最关键的部分。
从上图可以看出,DMA和CPU是同等地位的,CPU能进行的数据转移操作,DMA都能做,或者说,DMA就是只能做数据转移操作的迷你CPU。
如果要简单理解的话,DMA就是CPU小弟,当CPU觉得把一大串数据转移到另一个地方这种任务太麻烦,还有更重要的事情需要做的时候,就可以把这个任务丢给DMA去干,DMA干完或者出问题了跟CPU说一声就行了。