[td]
操作 | 话题 | 消息类型 | 功能 |
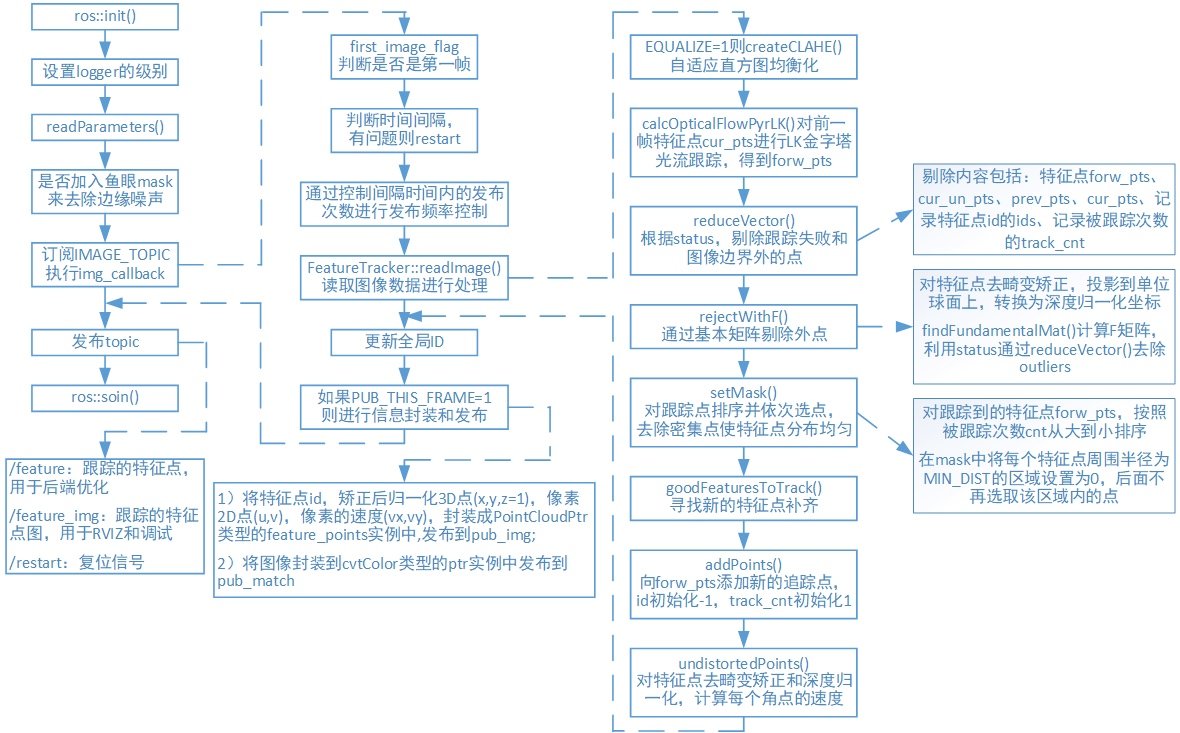
Subscribe | image | sensor_msgs::ImageConstPtr | 订阅原始图像,传给回调函数 |
Publish | feature | sensor_msgs:  ointCloud ointCloud | 跟踪的特征点,供后端优化使用 |
Publish | feature_img | sensor_msgs::Image | 跟踪特征点图片,输出给RVIZ,调试用 |
[td]
函数 | 功能 |
bool inBorder() | 判断跟踪的特征点是否在图像边界内 |
void reduceVector() | 去除无法跟踪的特征点 |
void FeatureTracker::setMask() | 对跟踪点进行排序并去除密集点 |
void FeatureTracker::addPoints() | 添将新检测到的特征点n_pts |
void FeatureTracker::readImage() | 对图像使用光流法进行特征点跟踪 |
void FeatureTracker::rejectWithF() | 利用F矩阵剔除外点 |
bool FeatureTracker::updateID() | 更新特征点id |
void FeatureTracker::readIntrinsicParameter() | 读取相机内参 |
void FeatureTracker::showUndistortion() | 显示去畸变矫正后的特征点 |
void FeatureTracker::undistortedPoints() | 对角点进行去畸变矫正,并计算每个角点的速度 |