【分享帖】第一课时 机器人知识 从波士顿动力学习机器人-1
6245
0
1
2018-03-21
不少对机器人感兴趣的同学应该对波士顿动力公司的机器人不陌生,每到一个时间节点,网络上就会被他们的机器人刷屏,从一只仿生机器狗(Big Dog)的出现到能够实现后空翻的机器人Atlas。这些标志性的机器人让不少人记住了这个神秘的魔法公司。
https://www.quora.com/How-is-Spot-by-Boston-Dynamics-actuated

波士顿动力公司(Bostondynamics)是在1992年成立的,创始人是Marc.Raibert。这家公司的前身是MIT LegLab,这个实验室研究的是足式机器人。后来Boston dynamics研发的Big Dog、Spot、Atlas人形机器人也无一不是有足的。而这家公司的每个产品似乎都代表当前人类能够制造机器人的最高标准。

有不少同学一定抱有一个疑问比如这种机器人有什么用?那么我们不妨带着这个问题先看看他们的产品和目标,就像Boston Dynamics的愿景所言一样:我们的使命是开发地球上最先进的机器人,拥有卓越的移动性、敏捷性、灵巧性。
Boston dynamics主要分为三类机器人,首先是大家最为熟知的四足机器人,比如Spot:
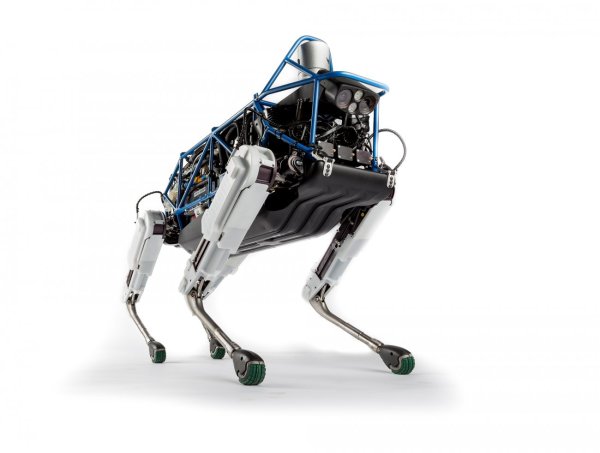
它的宣传视频是Spot在Bostondynamics楼道里跑来跑去,主要应用了视觉定位,有一个前置和后置的摄像头。拥有超强的稳定性和越野性能,当受到外界撞击后能迅速调整并维持稳定状态。
其次是人形机器人,最有名的是这个Atlas。

它能实现平稳行走、自己打开玻璃门走出房间,还能轻松搬起10磅重的箱子,在被人类干扰后,能找到目标再次搬起。Atlas能够轻易的完成越障、原地空翻等动作。
第三类是轮式,这款机器人名叫Handle,拥有超强的移动性能。

现在我们已经简单的了解了BostonDynamics的机器人类型,那么能否通过机器人的定义了解他们呢?从公开资料我们可以对Big dog简单分析一下。

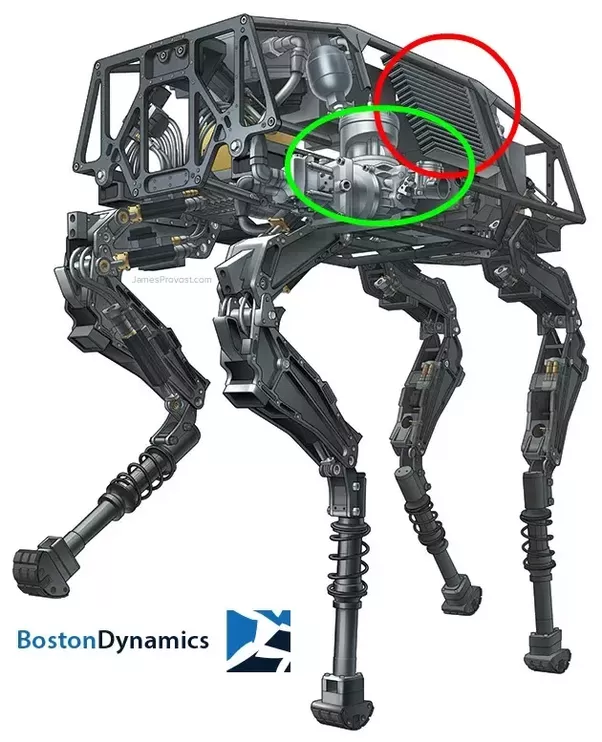
它包含传统机器人的三个组成部分:控制器、执行器、传感器。
控制器主要指的是以computer为核心进行数据运算处理,同时发送命令到底层,执行器则指的是整套液压驱动设备。传感器的话在Big Dog上使用了包括摄像头、压力、姿态等不同类型的传感器,这些部分组成了完整的Big Dog整体。
下面我简单讲述一下Big Dog的执行器,Big Dog由液压伺服控制。BigDog带给人们最直观的感受是它的协调性和适应性,因为毕竟机器人能像动物一样行走在各种路况下在这之前确实令人难以想象。但对于研究人员来说最令人震惊的是:多大的驱动能力才能承受这么大的负载?而这个问题的答案就是液压伺服控制。在Big Dog之前,几乎所有的机器人都是由电机驱动的。因为电机驱动易于实现,不需要考虑油源、油路等问题。也就是接上驱动电路就能转动。但是,电机的驱动的问题就是功率体积比太小。也就是说,同样大小的驱动结构,以电机与液压缸为对比,电机的输出功率相比液压缸而言非常的小。举个例子,同样要带动100kg的负载,液压缸可能只需要一个铅笔盒大小,而采用电机的话或许已经赶上BigDog的躯干大小了。所以,采用液压缸作为执行机构是增大负载能力的关键。
除了驱动结构,最让人印象深刻的是当实验员踢了Big Dog一脚后,他依旧能够维持稳定的状态,保持平衡,这方面的内容涉及到姿态规划问题,当然对于底层的控制研究者来说,就涉及到步态问题,而Boston Dynamics没有透露太多技术细节还需要我们自己去思考。下一篇文章我们将重点讲解如何去学习开发机器人。
引用连接:
https://zhuanlan.zhihu.com/p/34638078
https://www.bostondynamics.com/
文章标签
请问这篇文章对你有用吗?
【分享帖】第一课时 机器人知识 从波士顿动力学习机器人-1