【分享帖】第三课时 PWM控制技术 舵机的内部组成部分
7255
0
6
2018-03-29
在RoboMaster机器人基础教材中,我们学习到了PWM控制技术,对于我们高中生来说,pwm控制技术最常应用的地方便是舵机。 在机器人的电动玩具中我们经常会看到这种小东西,至少也听到过它转动起来“吱吱吱”的叫声。没错,他就是我们常见的执行器——舵机。
舵机的旋转不像普通电机那样的机械的转圈,他可以根据指定在0度到270度之间任意角度精准的停下来(不同种类舵机要求不同)。如果你想让某个东西按照你的想法,舵机是一个不错的选择,它控制方便、实现简单、种类繁多、总有能够满足同学们需求的产品。
舵机的旋转不像普通电机那样的机械的转圈,他可以根据指定在0度到270度之间任意角度精准的停下来(不同种类舵机要求不同)。如果你想让某个东西按照你的想法,舵机是一个不错的选择,它控制方便、实现简单、种类繁多、总有能够满足同学们需求的产品。
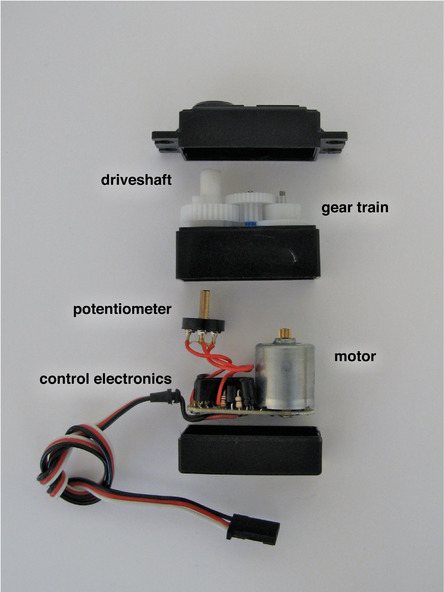
舵机是糅合了多项技术的执行器。它由直流电机、减速齿轮组、传感器和控制电路组成,是一套自动控制装置。自动控制相信大家有一定的了解了,它就是用一个闭环反馈控制回路不断校正输出的偏差,使系统的输出保持恒定。我们生活中见到的恒温加热系统就是自动控制装置的一个范例,其利用温度控制传感器检测温度,将温度作为反馈量,利用加热元件提输出,当温度低于设定值时,加热启动,温度达到设定值时,加热器关闭,这样就能使温度保持恒定。
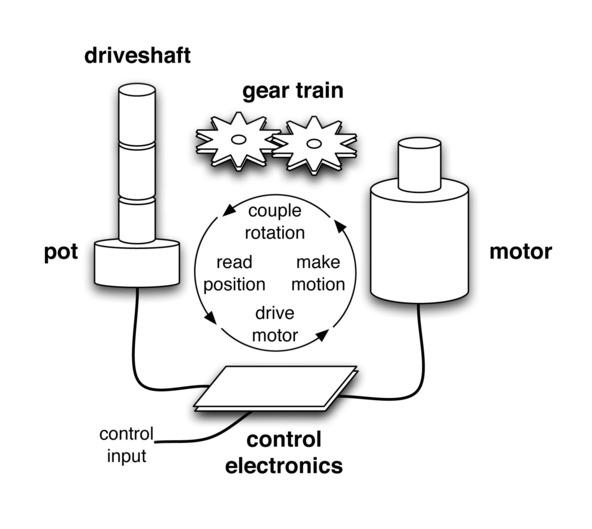
对于舵机而言呢,位置检测器是它的输入传感器,舵机转动的位置一变,位置检测器的电阻值就会跟着变。通过控制电路读取该电阻值的大小,就能根据阻值适当调整电机的速度和方向,使电机向指定角度旋转。图A显示的是一个标准舵机的部件分解图。图B显示的是舵机闭环反馈控制的工作过程。
对于舵机而言呢,位置检测器是它的输入传感器,舵机转动的位置一变,位置检测器的电阻值就会跟着变。通过控制电路读取该电阻值的大小,就能根据阻值适当调整电机的速度和方向,使电机向指定角度旋转。图A显示的是一个标准舵机的部件分解图。图B显示的是舵机闭环反馈控制的工作过程。
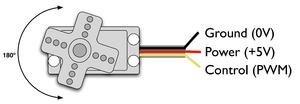
舵机有一个三线的接口。黑色的线是接地线,红色的线接+5v电压,黄线接控制信号端。
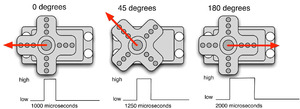
控制信号是一种脉宽调制信号,在RoboMaster实践指导书中有生成pwm波的方法。脉冲的高电平持续1到2毫秒,也就是1000到2000微秒。图上的舵机在1000微秒时,左满舵。在2000微秒时,右满舵。了解了舵机的驱动方法,同学们就可以使用舵机制作更多有趣的小制作了。

文章标签
请问这篇文章对你有用吗?
【分享帖】第三课时 PWM控制技术 舵机的内部组成部分