【求助帖】官方2016开源步兵代码yaw轴的pid反馈值问题?
q2296054658
30480
0
3
2018-08-04
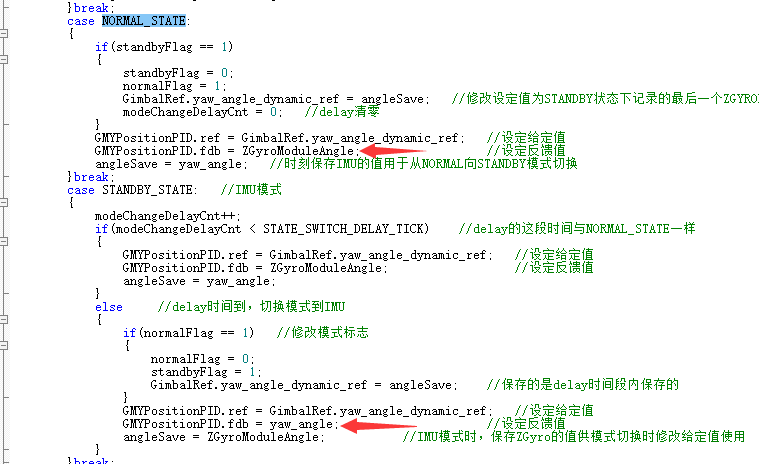
STANDBY_STATE和NORMAL_STATE两种模式下的反馈值分别读取的两个不同的陀螺仪yaw_angle,和ZGyroModuleAngle的值 ZGyroModuleAngle是通过can总线直接读取的角度值,应该是小黑块的值yaw——angle是通过四元数计算过来的,应该是板子上的陀螺仪模块,请问这两个陀螺仪的反馈值有什么区别吗如图所示
文章标签
请问这篇文章对你有用吗?
【求助帖】官方2016开源步兵代码yaw轴的pid反馈值问题?