【2019 官方直播】「线上培训」(内附内容合集)
robomaster
33757
0
109
2018-11-07
RM2019官方直播【第9期】——你熬过的夜爆过的肝真的有用吗!?
任务太多一团乱麻?
中期报告痛不欲生?
DDL永远做不完?
到了赛场才知道有些功能还没有加!!???
如何合理把控进度,高效利用时间?
最通俗易懂的敏捷项目开发流程,手把手教你利用ONES在研发过程中小步快跑。
重点是:电机送不完了,大家冲鸭!!!!!!!!!
本期直播
1.【萝卜开会】第9期:你熬过的夜爆过的肝真的有用吗!?教你用ONES把控进度、沉淀技术
2.【时间地点】2018年12月14日(周五)20:00(北京时间)
RM官方斗鱼直播房间,地址请戳:https://www.douyu.com/816396
3.【直播嘉宾】ONES产品经理:慧芳
 RoboMaster
RoboMaster看完规则请在本论坛下留言“关于使用ONES的疑惑”,我们将在直播中统一解答
{:2_37:}
【第8期】现场抽奖获奖名单- 153****2770
- 186****2548
- 131****9007
PPT回顾
RM2019官方直播【第1期】——宣传从入门到入土
RM2019官方直播【第2期】—— RoboMaster 2019机甲大师赛比赛规则手册V1.0答疑
RM2019官方直播【第3期】——如何像大公司一样带队?项目管理进修1.0
RM2019官方直播【第4期】——如何打造靠谱的机甲&战队?机械方法论&赛季规划
RM2019官方直播【第5期】——从焊板到眼瞎,如何打造最强机器人硬件?
RM2019官方直播【第6期】——如何像优秀程序员一样写嵌入式BUG?
RM2019官方直播【第7期】——规则1.1解析
RM2019官方直播【第8期】——算法方法论
RM2019官方直播【第9期】——ONES使用指南
录播链接:https://v.douyu.com/show/6Aw87O2NO2jvYGkg
【机械方法论统一回复】
1. 合理高效的机械做车流程应该是什么样的?
看完我们的机械方法论直播,大家对做车的流程应该有了自己的想法吧~
2. 机械老队员在备赛时应该充当什么角色,或者说机械老队员在备赛时应该做些什么。
老队员一般都有比较丰富的参赛经验,建议做一个指导的角色,减少新队员踩坑走偏的情况发生,特别实在需求分析和方案设计阶段
3. 方案是否都应由机械的人提出,做机械的应该怎么对待提车子方案这件事情。
建议是机械、电控和算法的同学们都做到一起进行分析,机械的同学更多考虑的是结构的可行性,电控和算法上能不能实现一个可能考虑会不够全面。应该怎么对待?认真对待呀,方案对最终的产出有这很大的影响,要多花点心思在方案设计上面。
4. 刚纳新完,一个好的机械培训应该是什么样的。
建议借鉴参考华南理工大学华南虎战队的新人培训方式,去年该战队输出国一片文章可以好好看一下
5. 做机械的应该怎么更好地提升自我,怎么知道更多创新的方案(像火星车底盘)。
个人建议好好夯实基础,真正能够派上用场的创新方案都是在厚实的机械理论知识基础上才提出来的
6. 做机械的对于电控视觉知识的了解程度应该是多少?
少要认识的元器件和工作原理,能够在哪里派上用场,电控视觉能够实现的事情和完全不能够实现的事情,例如要电控精准的控制舵机旋转的位置
7. 怎么处理把车子做完美精致和快速出车的矛盾?
建议先完成基本功能,再去不断完善提升机器人的性能
8. 云台一定要设计成两个旋转度的吗,可以利用车自身轮子的旋转来实现云台的左右旋转吗?
不一定,但单轴云台响应速度比较慢,通过车轮实现自身旋转比较难实现枪管的精准指向。就好比脖子能动的时候比落枕的时候舒服多了。
9. RM每年比赛都需要做很多辆车,怎么合理安排好机械组人员分配各兵种机械任务进度,防止划水还要能高效推进进度?
除了给组员一个具体的目标和ddl,还要安排好队员每天的任务,保证能够按时完成,久而久之就能够实现一个大目标啦。防止划水的话,个人认为划水的同学估计也是对比赛兴趣不大吧,那就没必要强留在队里干活了吧。
【嵌入式硬件统一回复】
1. 布线的时候信号线繁多应该怎么整理 有没有好的收纳工具呀
可以按分类整理:比如控制线扎一起,电源线扎一起,功率电路线扎一起,调试用的线扎一起等等,那些会经常插拔或者更换线的可以考虑不扎。可以使用线扣或者绕线组,另外,如果是自己layout板子,可以将一些信号线(比如电机+霍尔+编码器通信线走到一起)合成一个多pin的连接器
2. 想问一下滑环的使用注意
根据自己的使用需求(是否有强电流、高速信号等通过),购买合适的电滑环;需要实际上机测试电滑环和电机之间是否有相互干扰,假如没有干扰即可使用
3. 还有就是如何布置线路能方便检修
3. 还有就是如何布置线路能方便检修
尽量功能一致的线一起走,或者分模块走,不经常动到的线或者较难损坏的线可以布置在里面,用于调试的或者经常插拔的线要优先考虑装配的便捷性
4. 官方板子上的那层保护外壳特好看,是什么材料,是怎么做的
4. 官方板子上的那层保护外壳特好看,是什么材料,是怎么做的
材料为PVC泡棉,需要定制刀模切割出特定形状
5. 多层板推荐用AD吗,学画多层板的话有什么教程视频或者推荐的书吗
AD是大学生入门画板工具,推荐从AD学起;另外,有了AD的基础的同学可以使用ORCAD画原理图,Allergo画PCB;也可以使用PADS画,外面的公司基本 这几个软件;书籍的话暂时没有推荐,网上视频很多,可以找一两篇实践性的文档,例如《手把手教你使用allergo画一块PCB》这一类的文章,然后在自己实践的过程中去进一步学习
5. 机器运转过沉重开关内的弹簧抖动会产生不确定的震荡,然后后面的脉冲电路就会产生许多脉冲然后影响使用,如何用硬件方法消除这种震荡的影响
结构上是否可以使用一些缓冲的措施减少弹簧的震动;假如不行,一般弹簧的震动频率较低,可以使用一定的高通滤波器滤出;另外,为什么开关的抖动会对脉冲电路有影响,能够去掉这一块电路或者使用其他功能电路,避开这种开关弹簧抖动的影响
6. mpu6050值飘能用什么硬件滤波解决吗?
一般都是软件滤波;值漂基本都是温度造成,首先假如陀螺仪与其他模块做成 一块PCB,在设计的时候务必要使用孤岛掏空结构;另外可以使用温度闭环控制,类似开发板上使用加热电阻,维持陀螺仪附近区域的温度恒定
7. 电流,电机转动对mpu6050的值会不会有影响?影响大吗?用铝膜把电机包起来会不会好点,如果有用mpu9250可不可以消除这种影响?
理论上影响不大,但是假如电流波动大导致的MPU6050的电源纹波大,会导致输出不准确;MPU9250并不能消除这种影响
8. 请问对于超级电容在赛场上的表现,官方有什么想法?之后会出台一系列规则来限制超级电容吗?
今年还不会限制电容。随着比赛的进步,会在将来比赛中考虑限制容量等。
9. 请问对步兵底盘的布线方面,有什么建议或教程之类么?
可以将控制线扎一起,电源线扎一起,功率电路线扎一起,调试用的线扎一起等等;另外,如果是自己layout板子,可以将一些信号线(比如电机+霍尔+编码器通信线走到一起)合成一个多pin的连接器;减少线束
10. 请问官方在年前会不会推出新的主控板或者转接板这类商品?如果有,大概几月发售?
暂时不推新的主控或者转接板;
11. 底盘功率超限的硬件方案有哪些?
目前很多学校用的超级电容方案,可以高校间进一步沟通交流有其他方案,但前提是不可违背比赛规则;
12. 如果板子出现问题的话,有什么比较有条理的科学查板调试思路吗?
首先查该问题的模块电路是否短路或者开路,电源是否正常(这是第一步);电源没问题后模块上的信号波形或者各直流点的电压;这两步是基本的操作。其他的定位方法视不同情况而定,比如可以通过一块其他正常的板子,比对两者之间的波形差异,或者断开其他模块,单纯调试这个模块是否有问题等等用于排除其他因素;
13. 有什么方法可以降低硬件研发的成本
使用低成本的我器件;前期多花点时间调研方案,分析可行性后再做详细设计,避免投出去的板子回来功能失败,浪费人力物力时间;基于前人的基础开发,避免设计多个不切实际的方案等
【嵌入式软件统一回复】
1. 如何解决陀螺仪yaw轴漂的问题
目前采用去零漂的方式,采集一段静止的陀螺仪输出数据,计算平均值,去除零漂。
2. Yaw漂移大家有啥好方法呀?换个传感器吗?用现成的融合好的?
去陀螺仪零漂,目前视频中只用板载mu6500陀螺仪和加速度计出来的,无其他传感器。
3. 关于版本控制有什么好方法呀?写的人多了就很乱
可以使用git进行本地版本控制,多人同时进行控制可能需要搭服务器,大家可以上网参考一些相关教程。
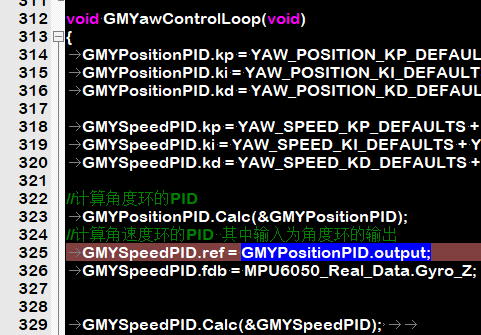
4. 串级pid怎么写呢,内环外环咋用?
4. 串级pid怎么写呢,内环外环咋用?
串级pid是角度环为外环,角速度环为内环。使用看成两个PID进行调试,其中外环的输出是内环的输入。官方开源步兵代码中,controlTask.c的文件中,有串级PID示例,大家可以参考使用
5. 想问下官方陀螺仪加磁力计了吗?
没有,只用了MPU6500。
6. 底盘速度闭环有必要吗?
步兵,英雄有必要。因为存在跑不直的现象,跑着跑着就歪了,但其他体积大的机器人如英雄,工程,云台没有yaw的自由度可能存在PID调节超调的问题导致操作体验不好。请对比各方面的考虑确定,推荐有射击功能的机器人具有速度环以及这是一个软件需求,可以比对测试看效果决定。
关联专栏
RoboMaster 课程沙龙
文章标签
请问这篇文章对你有用吗?
【2019 官方直播】「线上培训」(内附内容合集)