「2019」【大佬说】第八期 轮子
157503
0
32
2019-06-10
惊心动魄的分区赛终于全部结束了,在这里先祝福进国赛的队伍能取得好成绩,也勉励挥泪立场的朋友们再接再厉吧。
虽然我现在正在考试周垂死挣扎,但经历了比赛后也有很多想法。
例如,哈理工(荣城)的三轮全向轮英雄车,算是很特殊的设计之一了。
在RM参赛群里,大家也很关心坑(ROBOCON)的情况,这次也一并谈一下吧
总之,本次的主题简单明确——【轮子】
全向轮和麦轮在机器人比赛中大量应用最早应该可以追溯到ROBOCON开始比拼速度的时候,全向移动会带来很大的优势。(具体可以看以下推送:https://mp.weixin.qq.com/s/x0n7qrE2dQTTF9NTFpkQvQ)
具备转向能力的车,即便短期跑得欢,过两周,要么是地面一条条黑胎印,要么轮胎就磨平磨穿了。
更好一点的实现全向移动的方法就是给每个轮子都加一个转向(没错,就是一般汽车采用的方案)——即“全动轮”底盘。
但这种方式还是太复杂,一个轮子还得两个驱动,电控有苦说不出(然后机械背锅)
于是,麦轮和全向轮就出现在机器人比赛中了。
麦轮的移动原理就不再讲了,每一个打RM的都应该清楚。
而全向轮其实也不神秘。
麦轮是小胶轮(又称锟子)和轮毂成45度,转动时会产生倾斜于轮毂45度的力,而全向轮的锟子和轮毂成90度,转动时会产生垂直于轮毂的力。
于是全向轮也可以做到使车子全向移动,而且,三个就够了(当然,4个也可以)
所以,至少对于我来说,看到三轮全向轮的机器人并不感到惊讶。
当然,轮子也不是必须的,例如今年的坑,第二个机器人都是足式机器人(RM会不会之后也不许用轮子了呢,有点小怕)
足式机器人的水还是很深的。。。(不管是机械还是算法层面)不过还是希望能在RM比赛中看到足式机器人啊。
最后,都9102年了,RM继续奋斗!
虽然我现在正在考试周垂死挣扎,但经历了比赛后也有很多想法。
例如,哈理工(荣城)的三轮全向轮英雄车,算是很特殊的设计之一了。
在RM参赛群里,大家也很关心坑(ROBOCON)的情况,这次也一并谈一下吧
总之,本次的主题简单明确——【轮子】
全向轮和麦轮在机器人比赛中大量应用最早应该可以追溯到ROBOCON开始比拼速度的时候,全向移动会带来很大的优势。(具体可以看以下推送:https://mp.weixin.qq.com/s/x0n7qrE2dQTTF9NTFpkQvQ)
具备转向能力的车,即便短期跑得欢,过两周,要么是地面一条条黑胎印,要么轮胎就磨平磨穿了。
更好一点的实现全向移动的方法就是给每个轮子都加一个转向(没错,就是一般汽车采用的方案)——即“全动轮”底盘。
但这种方式还是太复杂,一个轮子还得两个驱动,电控有苦说不出(然后机械背锅)
于是,麦轮和全向轮就出现在机器人比赛中了。

麦轮的移动原理就不再讲了,每一个打RM的都应该清楚。
而全向轮其实也不神秘。
麦轮是小胶轮(又称锟子)和轮毂成45度,转动时会产生倾斜于轮毂45度的力,而全向轮的锟子和轮毂成90度,转动时会产生垂直于轮毂的力。

于是全向轮也可以做到使车子全向移动,而且,三个就够了(当然,4个也可以)
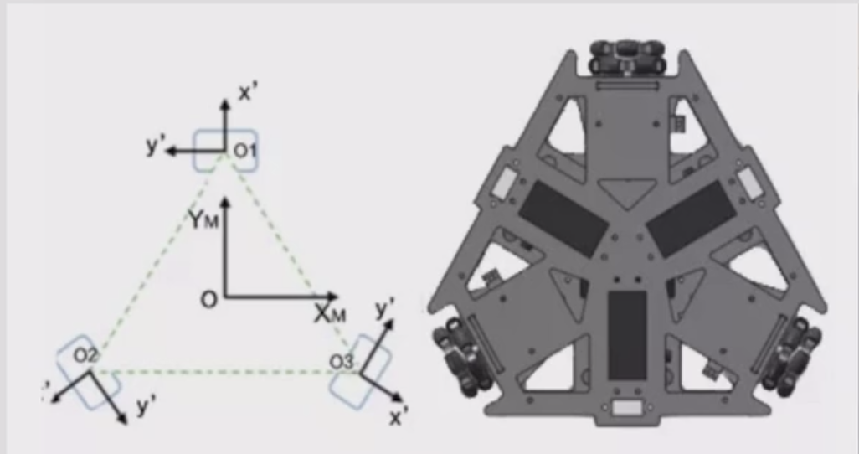

所以,至少对于我来说,看到三轮全向轮的机器人并不感到惊讶。
当然,轮子也不是必须的,例如今年的坑,第二个机器人都是足式机器人(RM会不会之后也不许用轮子了呢,有点小怕)
足式机器人的水还是很深的。。。(不管是机械还是算法层面)不过还是希望能在RM比赛中看到足式机器人啊。
最后,都9102年了,RM继续奋斗!
文章标签
请问这篇文章对你有用吗?
「2019」【大佬说】第八期 轮子