【RM2019-步兵视觉开源】上海交通大学交龙战队
93791
0
22
2019-08-18
本帖子为上海交通大学交龙战队视觉开源帖
使用者需注意:
1.本次开源作品仅用于技术交流,未经作者允许,不得作任何商业用途。
2.转载须注明作品出处,对非法转载者,作者保留采用法律手段追究的权利。
3.本作品的声明以及其修改权、保护作品完整权及最终解释权均归上海交通大学交龙战队所有。
蓝链:github传送门
一些感想: 今年视觉代码的主要编写成员都是刚入队的新成员,而交龙战队在过去也没有一个能用的自瞄系统,所以我们今年可以说是白手起家,重头开始。最终能做成现在这样还不错的效果,而且在比赛中发挥了不少作用,可以说也是十分不容易了。
虽然还是有一些想做的功能没有做出来,但我们相信这一年的工作还是可以给广大RM参赛队伍提供一些指导作用。同时明年我们一定会做的更好。
=================================================================
补充:原理介绍
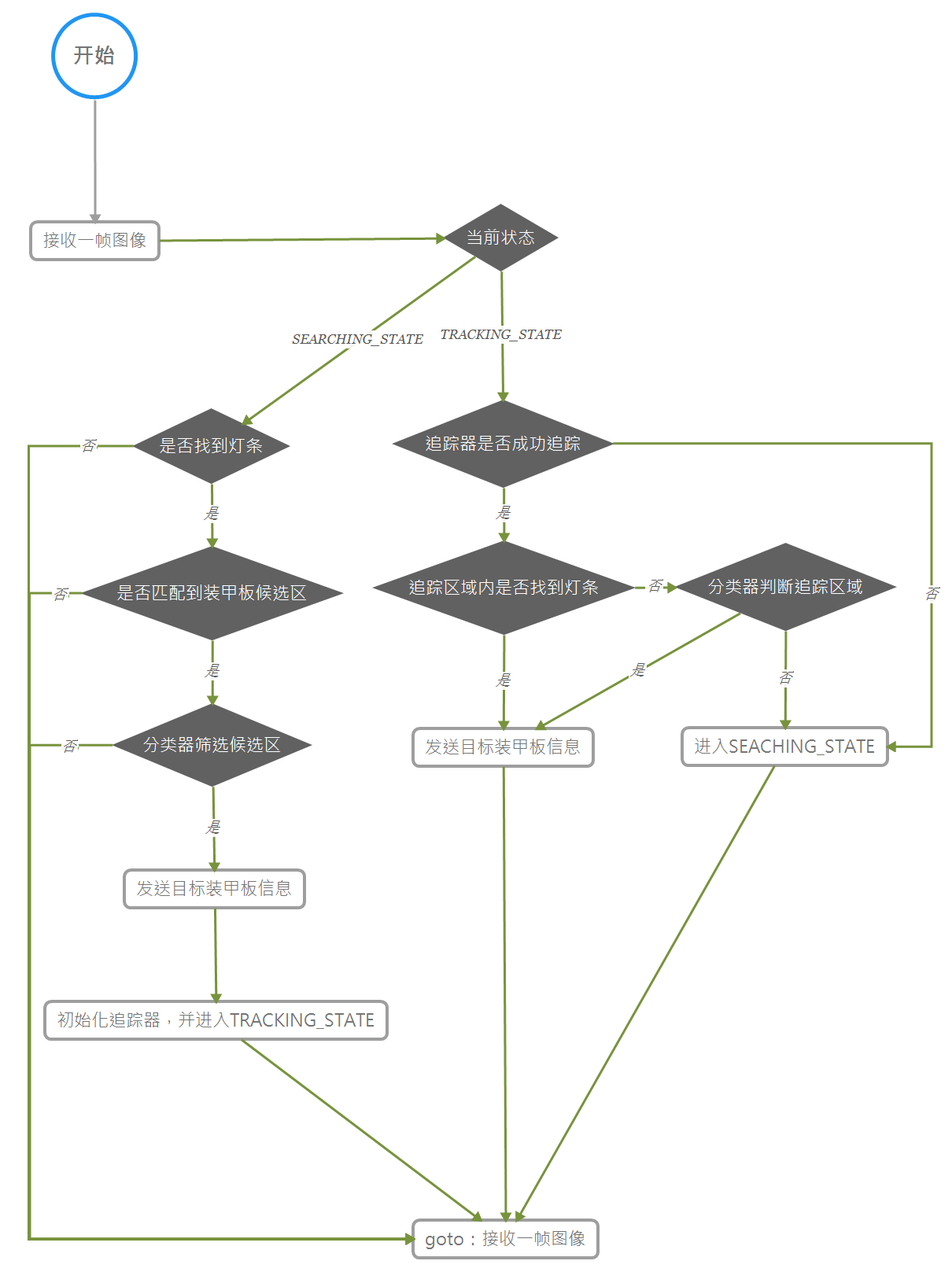
1.自瞄
自瞄的基本原理和绝大多数队伍都差不多,先上流程图
这里介绍一个可能与其他队伍不同的偏细节的步骤。
由于使用数字识别,相机亮度调整的比较高,光晕和反光较严重。体现在代码上的影响为对寻找灯条步骤中的二值化参数要求较高。所以本代码使用多个二值化阈值同时处理,再将重复的灯条区域剔除,以获取相对更好的鲁棒性。
2.能量机关
能量机关由于需要预测,所以需要定位中心点的位置,但如果直接识别中心,由于中心很小,很容易误识别,所以我们首先寻找特征更强的扇叶,利用中心点和扇叶大致的相对位置这一先验信息,缩小寻找中心的区域,使得对中心的定位不容易出错
使用者需注意:
1.本次开源作品仅用于技术交流,未经作者允许,不得作任何商业用途。
2.转载须注明作品出处,对非法转载者,作者保留采用法律手段追究的权利。
3.本作品的声明以及其修改权、保护作品完整权及最终解释权均归上海交通大学交龙战队所有。
蓝链:github传送门
一些感想: 今年视觉代码的主要编写成员都是刚入队的新成员,而交龙战队在过去也没有一个能用的自瞄系统,所以我们今年可以说是白手起家,重头开始。最终能做成现在这样还不错的效果,而且在比赛中发挥了不少作用,可以说也是十分不容易了。
虽然还是有一些想做的功能没有做出来,但我们相信这一年的工作还是可以给广大RM参赛队伍提供一些指导作用。同时明年我们一定会做的更好。
=================================================================
补充:原理介绍
1.自瞄
自瞄的基本原理和绝大多数队伍都差不多,先上流程图
这里介绍一个可能与其他队伍不同的偏细节的步骤。
由于使用数字识别,相机亮度调整的比较高,光晕和反光较严重。体现在代码上的影响为对寻找灯条步骤中的二值化参数要求较高。所以本代码使用多个二值化阈值同时处理,再将重复的灯条区域剔除,以获取相对更好的鲁棒性。
2.能量机关
能量机关由于需要预测,所以需要定位中心点的位置,但如果直接识别中心,由于中心很小,很容易误识别,所以我们首先寻找特征更强的扇叶,利用中心点和扇叶大致的相对位置这一先验信息,缩小寻找中心的区域,使得对中心的定位不容易出错
关联专栏
算法开源专栏
文章标签
请问这篇文章对你有用吗?
【RM2019-步兵视觉开源】上海交通大学交龙战队