【分享帖】从STM32开始的RoboMaster生活:进阶篇 IV
10458
0
0
2020-03-24
本文已经同步发布于作者部署的私人博客
为了更好的排版和观看体验
从STM32开始的RoboMaster生活:进阶篇 IV [DMA]
1.0 什么是DMA
1.1 DMA的定义
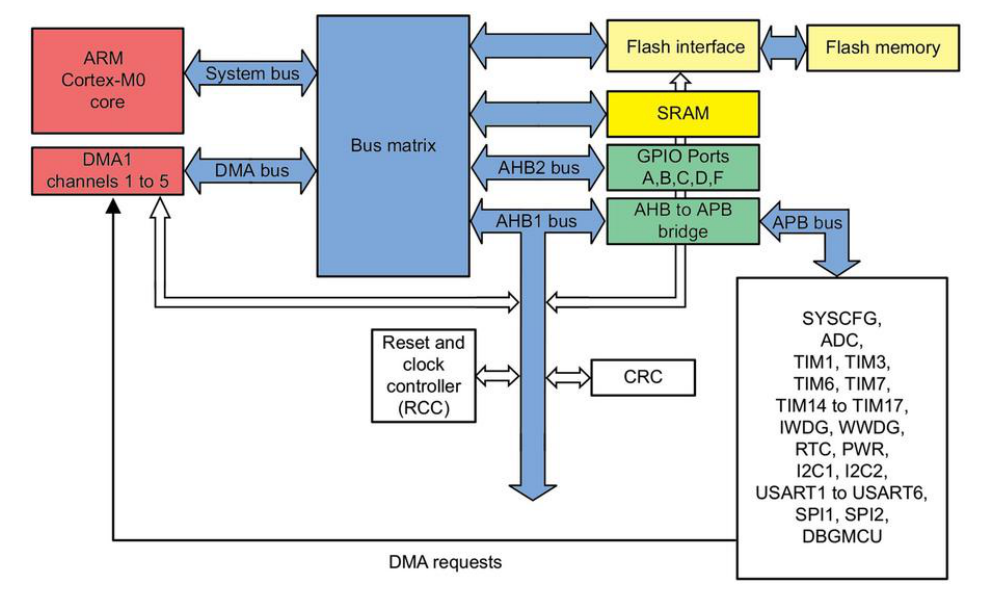
1.2 DMA的内部结构Direct Memory Access:直接存储器访问 是所有现代计算设备的重要特色,它允许不同速度的硬件装置来沟通,而不需要依赖于CPU的大量中断负载。否则,CPU需要从来源把每一片段的资料复制到暂存器,然后把它们再次写回到新的地方。在这个时间中,CPU对于其他的工作来说就无法使用。DMA传输将数据从一个地址空间复制到另外一个地址空间。当CPU初始化这个传输动作,传输动作本身是由DMA控制器来实行和完成。典型的例子就是移动一个外部内存的区块到芯片内部更快的内存区。像是这样的操作并没有让处理器工作拖延,反而可以被重新排程去处理其他的工作。DMA传输是高效能嵌入式系统算法和网络最关键的部分。从上图可以看出,DMA和CPU是同等地位的,CPU能进行的数据转移操作,DMA都能做,或者说,DMA就是只能做数据转移操作的迷你CPU。如果要简单理解的话,DMA就是CPU小弟,当CPU觉得把一大串数据转移到另一个地方这种任务太麻烦,还有更重要的事情需要做的时候,就可以把这个任务丢给DMA去干,DMA干完或者出问题了跟CPU说一声就行了。
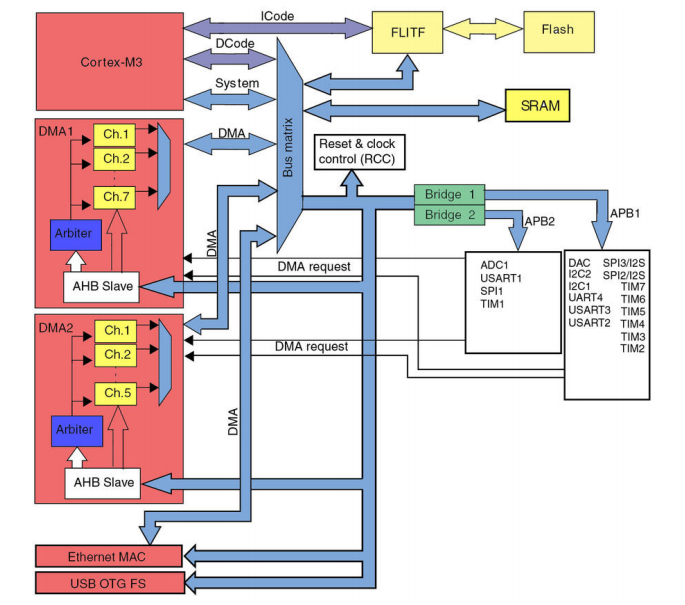
- STM32 –> DMA –> Stream –> Channel
- STM32F4家族拥有两个DMA,其中只有DMA2能够进行M2M操作(稍后会讲)。
- 每个DMA一般拥有8个Stream。
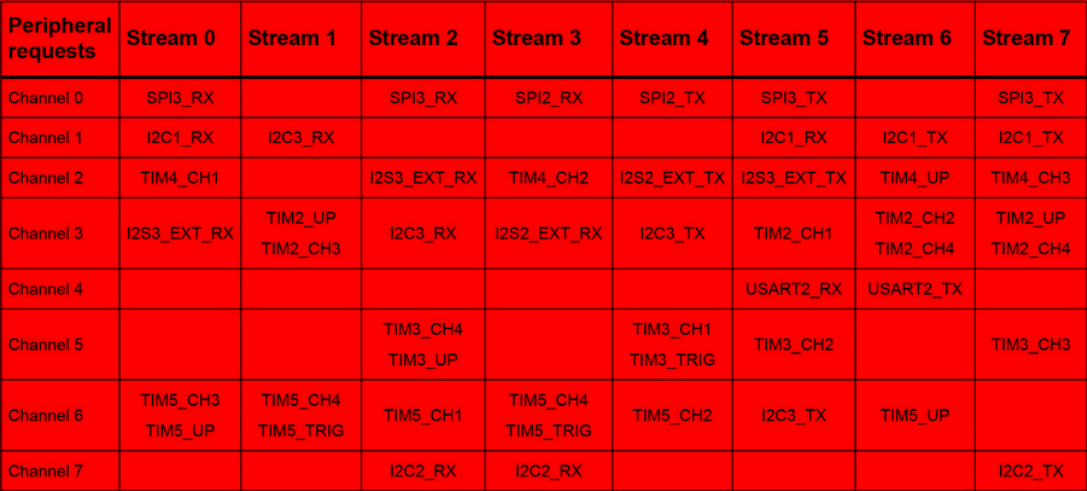
- 每个Stream有多个Channel选项,但是一次只能进行一个Channel的传输,具体的配置与选项请参考芯片对应的数据手册。
2.1 UART
- 这是最常见的使用情况,当有大量的数据从UART读入或者写入的时候,DMA将CPU解放出来,然后自己单干,让CPU处理更重要的事情。
- 一般在需要ADC时的通道扫描模式下,需要DMA来处理,本章不讲解这部分,放到后面专门讲ADC的篇章。
- 需要大量往SD里面读写数据的时候一般也用DMA来处理,本章不讲解这部分。
3.1 传输方向
- P2P
- Peripheral to Peripheral:从外设到外设 在RM中暂时用不上,不讲解
- P2M
- Peripheral to Memory:从外设到内存 当传感器从UART传来数据的时候用
- M2P
- Memory to Peripheral:从内存到外设 从UART传出数据控制执行器的时候用
- M2M
- Memory to Memory:从内存到内存 MCU内部的数据转移,常见于Buffer之间互相转移数据,或者从Buffer读写数据
- 只有DMA2能够执行M2M操作。
- First In First Out是STM32里面的DMA的特殊功能,但是一般来说,RM就算不用FIFO,DMA也能完美处理数据,所以暂时不需要,也同样不讲解。
3.3.1 Normal Mode
- 常用的默认模式,在该模式下,任务完成后就停止DMA,如果还需要用到DMA,需要再次手动启动。
- 可选模式,在该模式下,任务完成后,DMA的Buffer清零,再次执行任务。也就是说,永远重复执行下去,除非手动停止。
3.4.1 DMA泛用方法(需要用到寄存器)
3.4.1.1 Polling
[code]HAL_StatusTypeDef HAL_DMA_Start(DMA_HandleTypeDef *hdma, uint32_t SrcAddress, uint32_t DstAddress, uint32_t DataLength);[/code]需要注意的是,DMA的Polling其实根本毫无意义,因为在这个过程中,CPU还是全程参与了,并没有解放CPU,所以,虽然这种方法我还是列出来了,但是除了Debug时可能会用到,其他情况下建议不要用。
- 参数
- hdma:指向DMA Stream配置结构体
- SrcAddress:需要传输的数据的地址
- DstAddress:数据传输到的目标地址
- DataLength:传输的数据大小
- 返回值
- HAL_StatusTypeDef:如果传输配置成功,返回HAL_OK;如果该DMA Stream正在被占用,返回HAL_BUSY
- 通过修改CR3寄存器对应的bit,开启DMA传输
- 参数
- hdma:指向DMA Stream配置结构体
- CompleteLevel:指定DMA的完成程度
- Timeout:传输的最大时限
- 返回值
- HAL_StatusTypeDef:如果传输成功,返回HAL_OK;如果传输出错,返回HAL_ERROR;如果传输超过最大时限,返回HAL_TIMEOUT
- 通过修改CR3寄存器对应的bit,结束DMA传输
[code]HAL_StatusTypeDef HAL_DMA_Start_IT(DMA_HandleTypeDef *hdma, uint32_t SrcAddress, uint32_t DstAddress, uint32_t DataLength);[/code]
- 参数
- hdma:指向DMA Stream配置结构体
- SrcAddress:需要传输的数据的地址
- DstAddress:数据传输到的目标地址
- DataLength:传输的数据大小
- 返回值
- HAL_StatusTypeDef:如果传输配置成功,返回HAL_OK;如果该DMA Stream正在被占用,则返回HAL_BUSY
- 通过修改CR3寄存器对应的bit,开启DMA传输
......
}[/code]
- 在写代码的时候,在main.c中创建XferCpltCallback函数
- 在该函数中填写DMA传输结束后,需要执行的代码
- 通过修改CR3寄存器对应的bit,结束DMA传输
[code]HAL_StatusTypeDef HAL_UART_Transmit_DMA(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);[/code]
- 参数
- huart:指向UART引脚配置结构体
- pData:指向需要传输的数据
- Size:传输数据的大小
- 返回值
- HAL_StatusTypeDef:如果传输配置成功,返回HAL_OK;如果传输出错,返回HAL_ERROR;如果该DMA Stream正在被占用,则返回HAL_BUSY
- 参数
- huart:指向UART引脚配置结构体
- pData:指向需要传输的数据
- Size:传输数据的大小
- 返回值
- HAL_StatusTypeDef:如果传输配置成功,返回HAL_OK;如果传输出错,返回HAL_ERROR;如果该DMA Stream正在被占用,则返回HAL_BUSY
......
}[/code]
- 在写代码的时候,在main.c中创建HAL_UART_TxCpltCallback函数
- 在该函数中填写UART发送结束后,需要执行的代码
......
}[/code]
- 在写代码的时候,在main.c中创建HAL_UART_RxCpltCallback函数
- 在该函数中填写UART接收结束后,需要执行的代码
4.1 项目简介
- 一键发送信息:按下用户自定义按钮,就从UART发送出预先设定好的信息,完成后在板子上亮红灯0.2s。
- 键盘回响:按下键盘,从STM32返回对应的字符,完成后在板子上亮绿灯0.2s。然后,再加上上面一键发送信息的功能。
4.2.1 一键发送信息完整的工程文件可以在这里找到!
- DMA泛用方法 Polling
- DMA泛用方法 Interrupt
- UART特化方法代码链接:https://github.com/AlchemicRonin/-STM32-RoboMaster-
4.3 效果展示
- 因为按键回响已经包含了一键发送信息的功能,所以视频部分就只录了按键回响的效果
[media=x,760,570]http://player.bilibili.com/player.html?aid=97217251&cid=165950467?page=1[/media]
本文已经同步发布于作者部署的私人博客
为了更好的排版和观看体验
文章标签
请问这篇文章对你有用吗?
【分享帖】从STM32开始的RoboMaster生活:进阶篇 IV