【RM2020 圆桌】第六期 谈谈英雄抛射
RoboMaster 高校赛务
78508
2
101
2020-04-02

【圆桌时间】:2020年4月3日(周五) 20:00-21:00
【圆桌主题】:谈谈英雄抛射
【圆桌嘉宾】:@bibigrd RM技术攻城狮
【主持人】:@RoboMaster赛务
【圆桌流程】:20:20-21:00 实时问答环节 (嘉宾与论坛网友)
【背景内容】:请见下文开源内容(重要内容,一定要先看哦!)温馨提示:
在直播期间,大家可以直接移步至论坛活动版块 https://bbs.robomaster.com/forum-club-1.html,直播墙会自动实时更新内容。
背景内容:
1. 抛射英雄和传统英雄区别:
主要区别是使用皮筋蓄能发射替换了摩擦轮发射
2. 为什么想到使用皮筋蓄能发射:
赛场一直都只有摩擦轮发射;为了能够达到远程精准吊射的功能,我们开发一种不同形式且更加稳定地发射机构来实现这个功能。
3. 皮筋蓄能发射相较于摩擦轮发射优缺点:
皮筋蓄能发射避免了摩擦轮电机转速波动等对于射速和左右旋的影响。主要缺点在于发射部分所占用体积较大,没有摩擦轮发射那么集成化。
4. 制作的难点:
为了保证发射精度,需要将发射轨道固定牢固,尽可能减小间隙,避免在发射过程中发射方向发生改变影响弹道;皮筋有寿命限制,相当于消耗品,需要能够快速安装皮筋的方法。
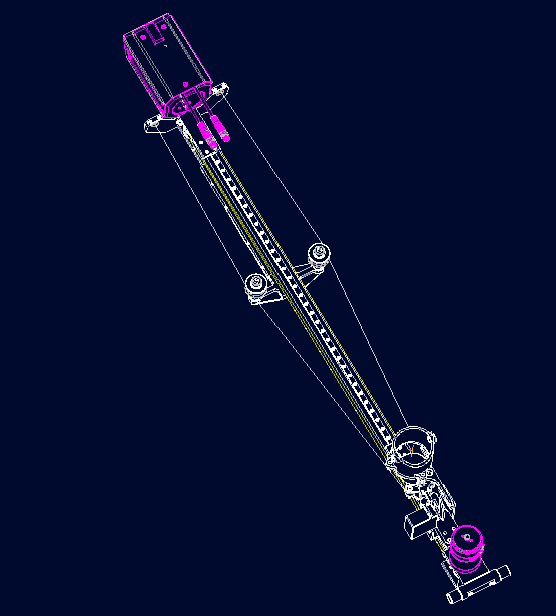
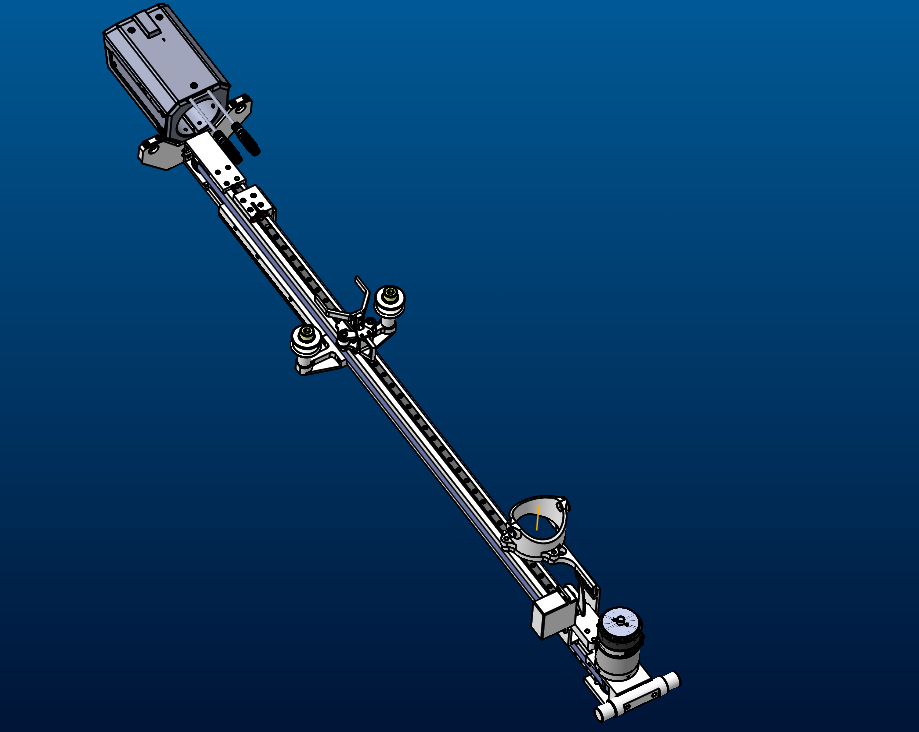
5. 改变瞄准方向的方法以及减小虚位的方法:
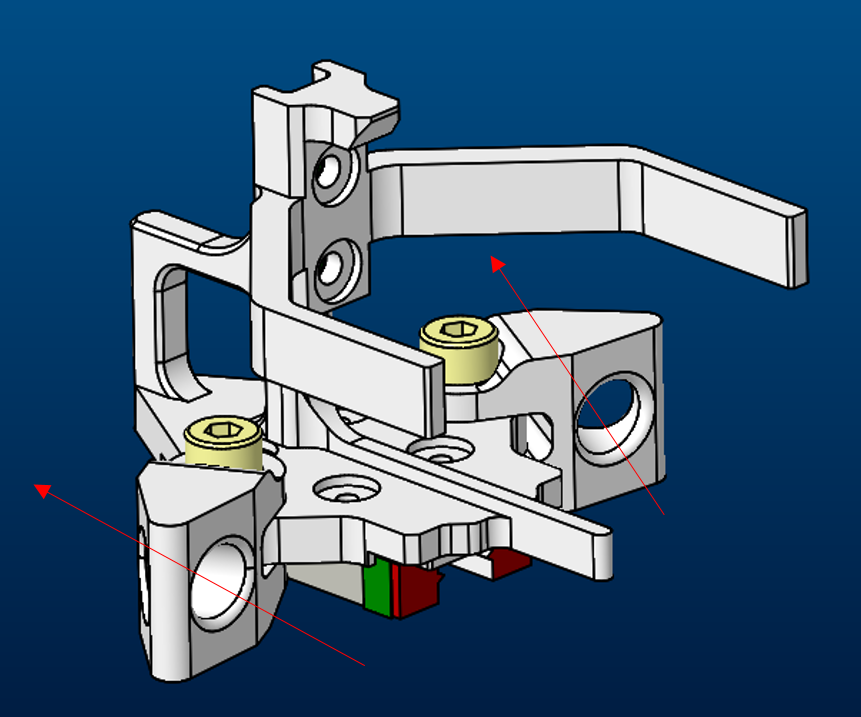
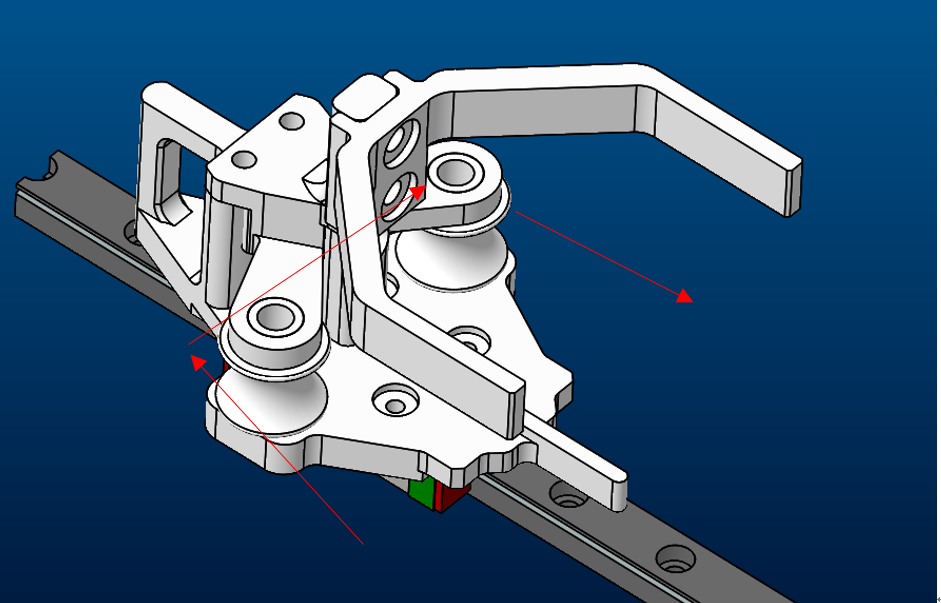
通过一个横向以及一个纵向的丝杆或者其他方法来控制,如下图所示:
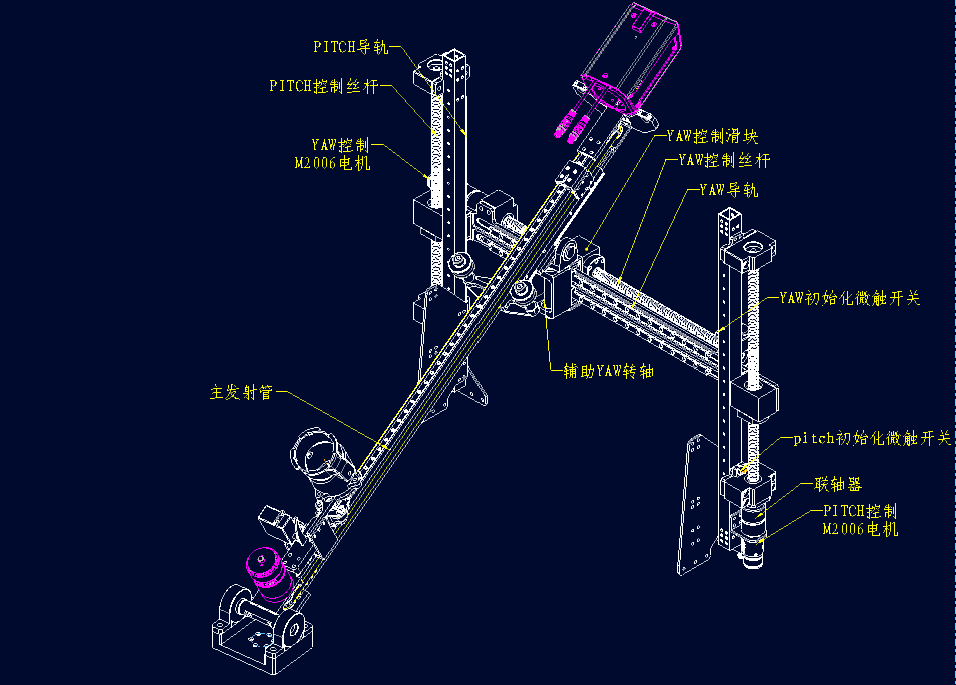
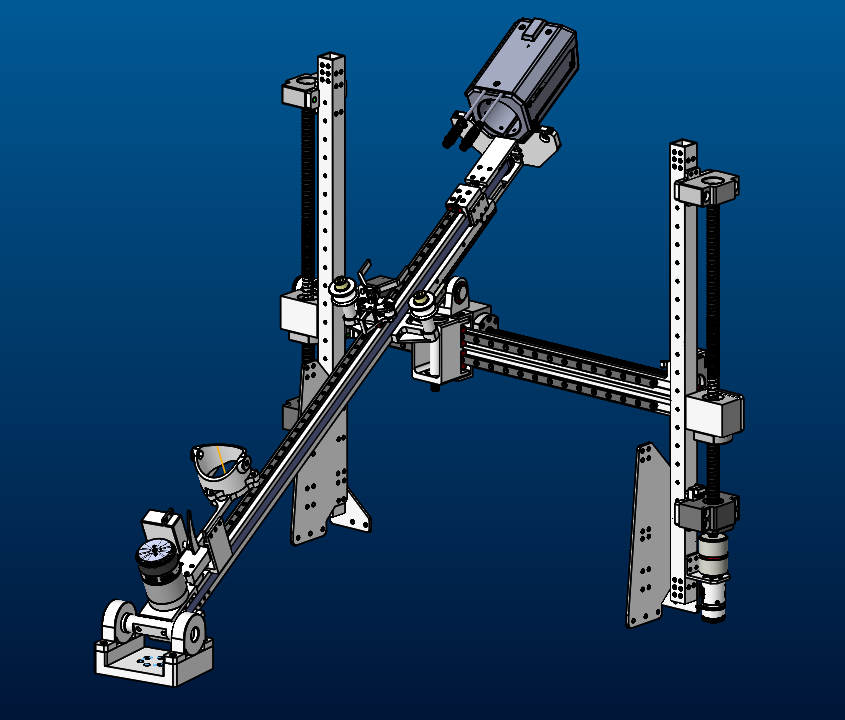
丝杆选择的型号是1204的滚珠丝杆套装,导程4mm,使用1:36的M2006电机控制,控制精度达到0.1mm。将控制发射方向的平面尽量放在发射管的末端,这样可以将避免悬臂发射管在发射时的晃动,并且控制面相对于住转轴越远,直线控制精度转换到角度控制精度就越精确。
每一个运动副都采用双MGN9滑轨滑块套装来保证其虚位最小,在旋转副中使用了高精度回转支撑XRU2012UUCC0P5,以及双轴承辅助压力球轴承等方式减小间隙。
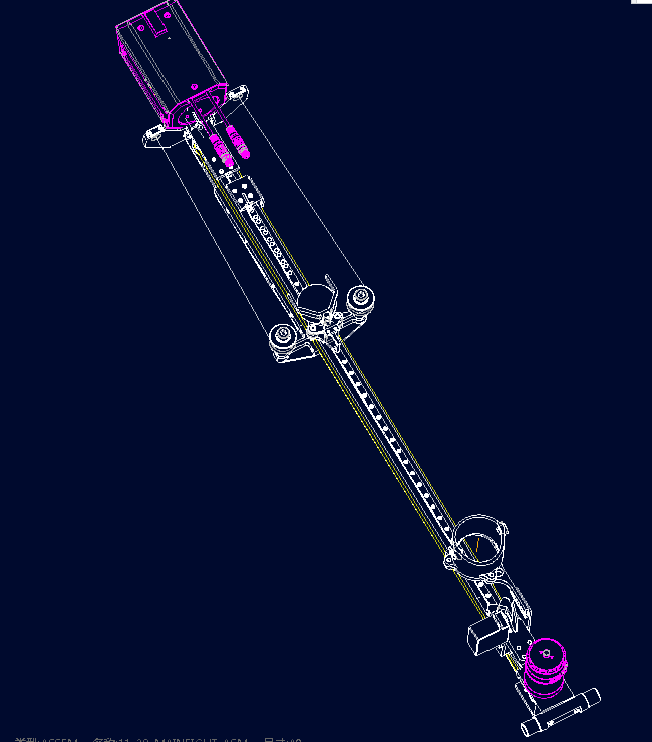
6. 如何蓄能:
使用同步带、链条等传动方式,通过一个滑块将能够装载大弹丸的滑块拉下并卡入撒放器中,再将滑块反方向回到轨道末端。这样只要扣动撒放器扳机就能释放皮筋进行发射。
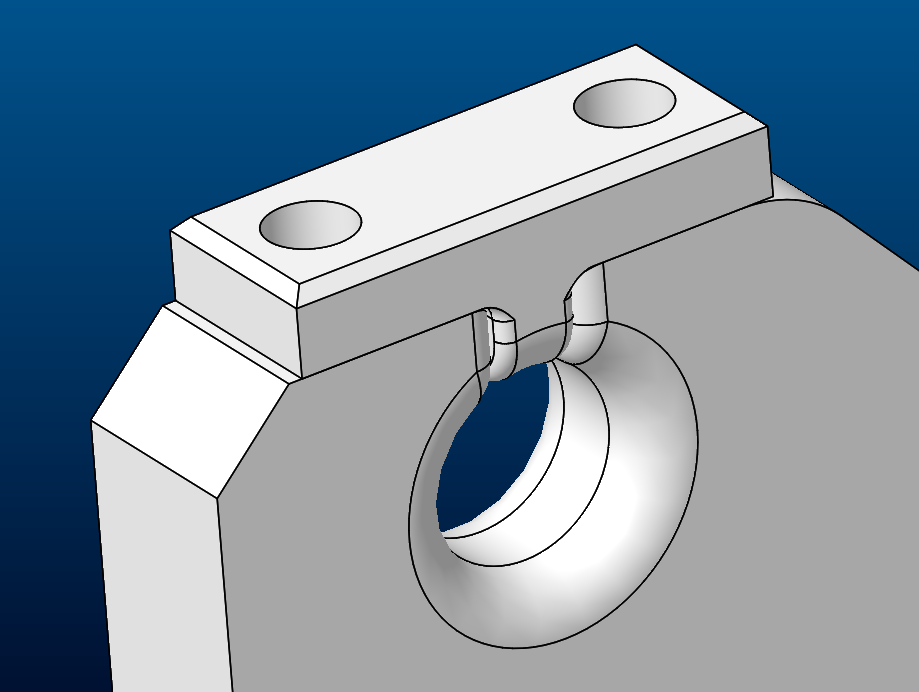
7. 皮筋固定的方式:
将一个较皮筋穿过一个圆孔,再在皮筋中塞入一个较皮筋内径较大一些的钢珠,再将皮筋反方向拉紧,钢珠会将皮筋撑大并卡在圆孔一端并压死,达到固定皮筋的目的。
在第一代的测试中,发现皮筋传入孔洞较为麻烦。改进后再孔洞上方开一个槽,这样的话就可以将皮筋拉长变细之后,直接很方便地从槽中插入。在孔洞处进行圆角处理是为了避免皮筋被直角割断,保护皮筋。
8. 滑块端如何固定皮筋:
这里经过了两代的改进。
第一代:
使用两条相同长度的皮筋,和之前说的皮筋固定方式一样,通过钢球卡住皮筋。不过因为在发射之后,发射块回到原始位置之后会继续进行减速运动,速度为0后再返回来,经过一段时间的震动才能释放完能量静止下来。固定在发射块这端的皮筋会经过多次弯折,多次发射后很容易磨断。而且两条皮筋经过两端的固定,无法保证两条皮筋的力量一致,会对滑轨出现径向力,降低滑轨的寿命。
第二代:
相较于第一代的发射块,将两根皮筋改进成只需要一根皮筋,采用双导轮,这样可以通过自身的调整控制两边的力量一致。
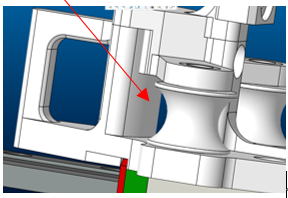
后面部分增加一个大圆弧来保护减速时的反向弯折。
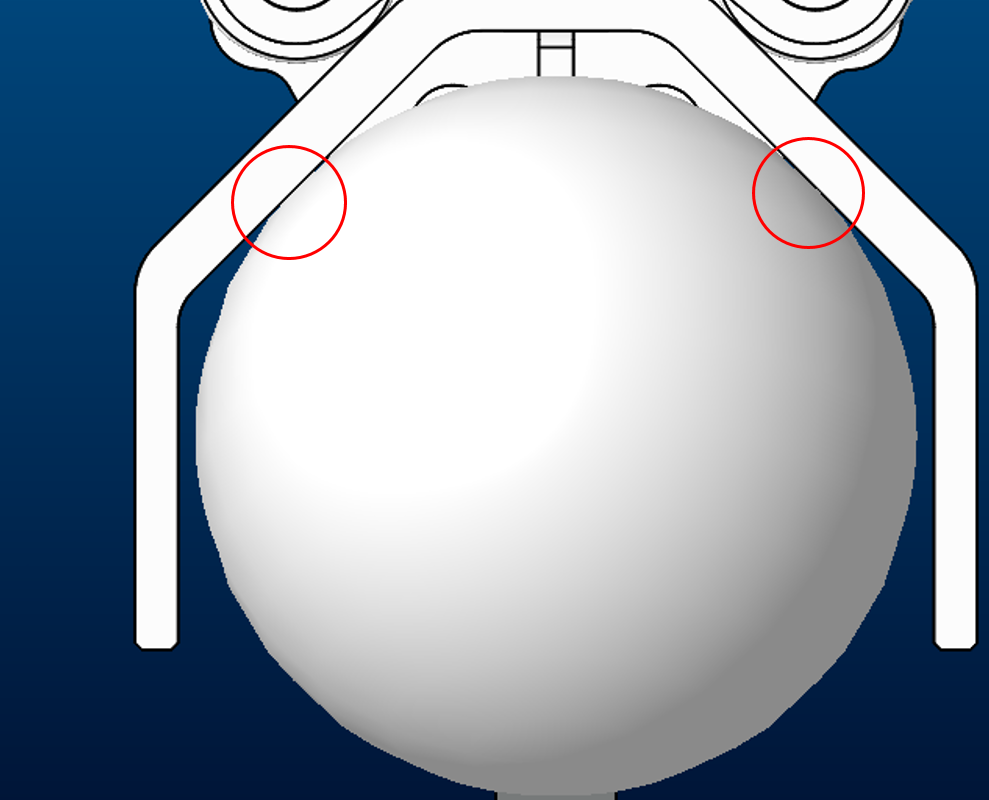
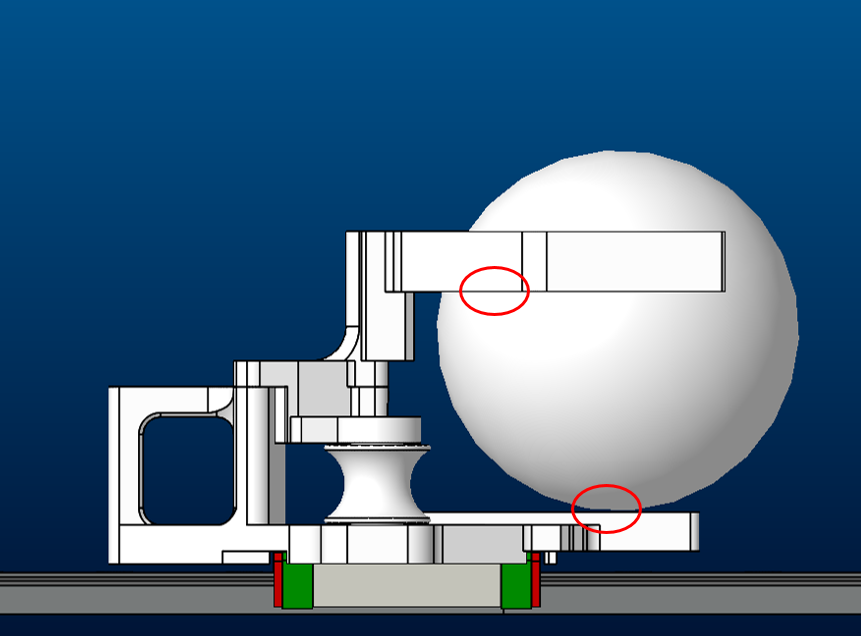
9. 如何将弹丸固定在发射块上:
如上面介绍中的图片,通过发射块上的3爪来放置,释放皮筋的时候,发射块加速会将弹丸压在3爪对应的位置,可以在发射过程中保证弹丸的稳定,以保证弹道的稳定。
10. 皮筋的寿命如何:
目前使用的是4-8的皮筋,测试大约230发左右会从中间截断。
11. 命中率:
最近的测试中,在打符点吊射基地,击中顶部装甲的命中率有80%-90%,未命中的也是击中了侧面大装甲。
问答汇总:
1. 请问抛射大弹丸精度如何呢?
目前在新场地上的测试结果: 在打符点远程吊射基地命中顶部装甲板,命中率达到90%左右,未命中的也击中了侧面大装甲
目前在新场地上的测试结果: 在打符点远程吊射基地命中顶部装甲板,命中率达到90%左右,未命中的也击中了侧面大装甲
2. 请问抛射大弹丸精度如何呢?
我们现在最大射频在每3秒一发,最大命中率的射频在5秒一发左右
我们现在最大射频在每3秒一发,最大命中率的射频在5秒一发左右
3. 打移动目标会不会跟不上目标?
目前我们做的只是打击静止目标。
目前我们做的只是打击静止目标。
4. 对基地校准大概会花几发?
目前是在现场用遥控器操作的情况下,使用了3发校准,后面可以连续击中基地。因为图传的视野中基地太小,考虑使用雷达站的长焦镜头在操作间进行投屏以提供操作手反馈,在反馈较准确的情况下,3-4发就可以校准,如果提前在场地适应性训练做好校准,可以在1-2发完成。
目前是在现场用遥控器操作的情况下,使用了3发校准,后面可以连续击中基地。因为图传的视野中基地太小,考虑使用雷达站的长焦镜头在操作间进行投屏以提供操作手反馈,在反馈较准确的情况下,3-4发就可以校准,如果提前在场地适应性训练做好校准,可以在1-2发完成。
5. 请问目前是多大的射速呢, 加速行程多大?
射速是通过皮筋原始长度来调节,后期可以在撒放器处增加一个丝杆调节皮筋伸长量来调节。我们测试的射速为16m/s左右,加速行程300mm
射速是通过皮筋原始长度来调节,后期可以在撒放器处增加一个丝杆调节皮筋伸长量来调节。我们测试的射速为16m/s左右,加速行程300mm
6. 皮筋在使用过程中产生磨损对于大弹丸击打的精度有多大的影响呢?
目前测试中所显示,皮筋只有在最后快要断裂前的精准度下降一些,其他时候没有影响。
7. 假如攻击目标从前哨战切换到基地,调整时间需要多久?pitch和yaw使用丝杆调角度速度大概是多快?
如果程序中已经有两个打击点的相对位置,采用一键切换,大概6s左右可以完成
如果程序中已经有两个打击点的相对位置,采用一键切换,大概6s左右可以完成
8. 橡皮筋是如何选择的,在实验前是否对电机所需力矩进行计算,如何知道3508电机(看着像,我猜的)的力矩已经满足要求?
在上一代的测试中已经确认力矩是过剩的,所以未进行理论分析。如果需要的话可以通过对发射块、弹丸加速到16m/s这个出发点计算皮筋的力
在上一代的测试中已经确认力矩是过剩的,所以未进行理论分析。如果需要的话可以通过对发射块、弹丸加速到16m/s这个出发点计算皮筋的力
9. 如何在最开始确定所需橡皮筋的原长、形变量等对结构有重大影响的参数,橡皮筋越长,弹丸速度越大?
皮筋的原长我们采用的是实验法,就是通过测速的反馈最后确定的原长。我们在未上膛前皮筋就已经有一定的形变量。皮筋形变量越大,弹丸速度越大。
皮筋的原长我们采用的是实验法,就是通过测速的反馈最后确定的原长。我们在未上膛前皮筋就已经有一定的形变量。皮筋形变量越大,弹丸速度越大。
10. 请问电控布线是否有可能会影响到吊射机构呢?
只需要避开弹丸发射的轨道即可,目前唯一有影响的测速航空线,可以使用弹簧线从上方绕过,或者沿着发射管从主转轴回到底盘
只需要避开弹丸发射的轨道即可,目前唯一有影响的测速航空线,可以使用弹簧线从上方绕过,或者沿着发射管从主转轴回到底盘
11. 抛射有没有采用自瞄?
没有使用,后期可能会增加测距以及自动确定P轴角度
没有使用,后期可能会增加测距以及自动确定P轴角度
12. 请问大弹丸尺寸的波动对精度有影响嘛?
这个问题目前没法回答;测试使用的是旧的弹丸,没有特意称重以及测量直径,命中率90%左右。后期可以使用高度一致的弹丸进行测试。
这个问题目前没法回答;测试使用的是旧的弹丸,没有特意称重以及测量直径,命中率90%左右。后期可以使用高度一致的弹丸进行测试。
13. 请问供弹速度有多快呢?
前面的回答中有提到,最快射频在3s/发左右,供弹速度可以很快,不过上膛等其他速度会慢一些,个人感觉射频还有提升空间
前面的回答中有提到,最快射频在3s/发左右,供弹速度可以很快,不过上膛等其他速度会慢一些,个人感觉射频还有提升空间
14. Y轴和P轴的响应会不会有点慢?
响应速度需要快的话可以考虑使用导程大的丝杆,不过调节精度就会下降。我们设计是为了远程吊射,需要高精度的弹道,取舍中舍去了响应速度。
响应速度需要快的话可以考虑使用导程大的丝杆,不过调节精度就会下降。我们设计是为了远程吊射,需要高精度的弹道,取舍中舍去了响应速度。
15. 双轴承辅助压力球轴承减小间隙是用在哪里的?
在丝杆运动过程中会因为缺少自由度卡死,所以需要两个辅助的旋转副以及一个移动副。在绕z轴的辅助旋转副中使用了双轴承辅助压力球轴承,通过转轴末端上螺母压死以达到降低间隙的目的。
在丝杆运动过程中会因为缺少自由度卡死,所以需要两个辅助的旋转副以及一个移动副。在绕z轴的辅助旋转副中使用了双轴承辅助压力球轴承,通过转轴末端上螺母压死以达到降低间隙的目的。
16. 请问发射时后坐力怎么样呀?
因为除了发射弹丸,还需要对发射块减速,后坐力挺大的,所以需要降低间隙,防止在后坐力作用下的震动导致无法重复弹道。
因为除了发射弹丸,还需要对发射块减速,后坐力挺大的,所以需要降低间隙,防止在后坐力作用下的震动导致无法重复弹道。
17. 撒放器是怎样的结构?
这个上网就能搜到,大概是通过一个顶针卡住一对齿轮不能张合,如果松开顶针就能将卡住的释放出去。
这个上网就能搜到,大概是通过一个顶针卡住一对齿轮不能张合,如果松开顶针就能将卡住的释放出去。
18. 感觉可以利用滑轮使皮筋进行反向,这样就在皮筋长度相同的情况下,减少导轨的长度,而且皮筋初始预紧力还是存在的
是的,这个可以,不过这样就会将横向的空间拉大。而且加速度很大而减小加速距离,可能会影响弹道,我们这边目前没有测试。不过已经使用了两个滑轮来实现将皮筋伸长的干磨去掉。如果在这个基础上将滑轮增加改变皮筋方向的功能,即将皮筋固定端移到撒放器方向即可。这个在我们这里某个机构上已经用上了,后面大家会看到。
是的,这个可以,不过这样就会将横向的空间拉大。而且加速度很大而减小加速距离,可能会影响弹道,我们这边目前没有测试。不过已经使用了两个滑轮来实现将皮筋伸长的干磨去掉。如果在这个基础上将滑轮增加改变皮筋方向的功能,即将皮筋固定端移到撒放器方向即可。这个在我们这里某个机构上已经用上了,后面大家会看到。
19. 能详细说一下固定皮筋的方式吗?为什么钢珠不会被反向挤出来?
如图,这个说不是很清楚,大概就是因为皮筋的内径比钢珠小,我使用的是8mm的钢珠,塞入内径4外径8的皮筋里,皮筋自己的力可以保住钢珠,加上被拉扯挤压在固定块上,所以一般不会被反向挤出来。以前使用过7.5mm的钢珠,有出现过一次被挤出来的现象。


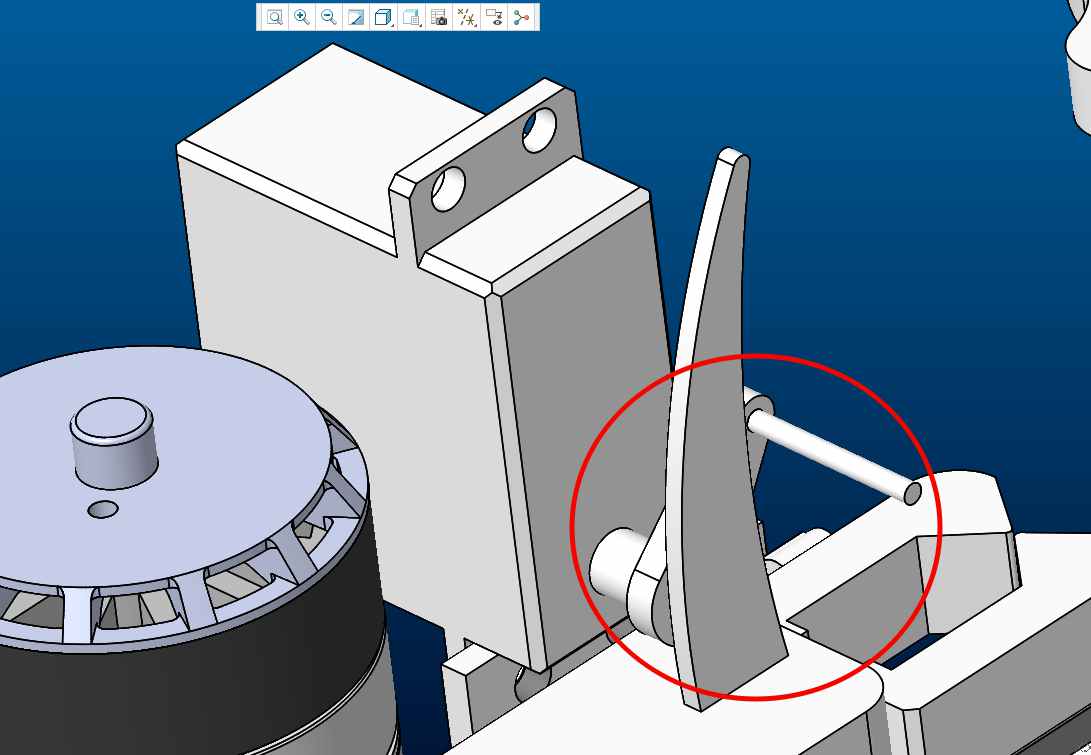
20. 能具体描述一下扳机结构吗?是通过舵机控制吗?
是的,使用舵机旋转舵机臂来控制撒放器的扳机,如图
是的,使用舵机旋转舵机臂来控制撒放器的扳机,如图

关联专栏
RoboMaster 课程沙龙
文章标签
请问这篇文章对你有用吗?
【RM2020 圆桌】第六期 谈谈英雄抛射