【求助帖】云台-双环PID(增量型)控制
麦兜一号
48455
0
0
2021-07-19
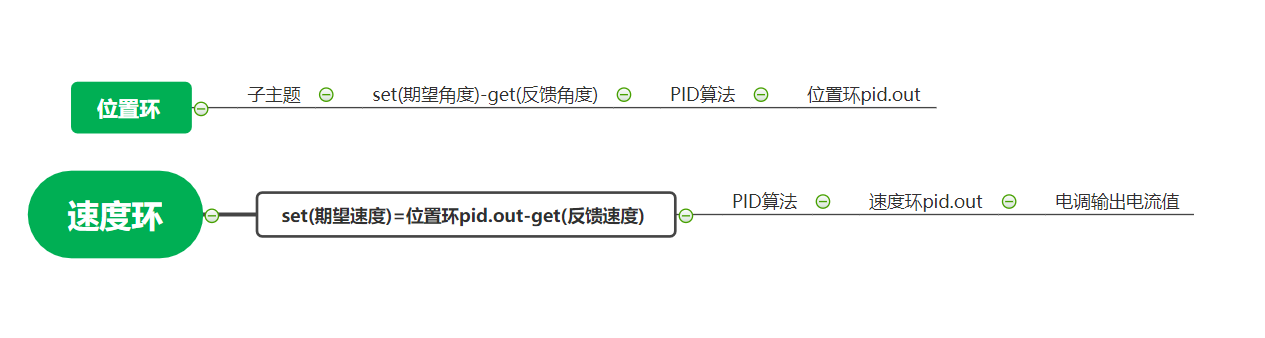
云台能收外界被迫变动位置后,都能自行恢复到初始位置,这便是位置环。
云台有一个里的作用以抵消外界给它的力,这便是速度环。
速度环+位置环,便能让云台快速响应,又有一定力的维持在预设角度位置,可谓是又快又稳又有力量。
说白了它其实是,一个同比放大误差的,达到快速响应的目的。
想更多了解,可去到B站搜索up机甲大师,链接:https://www.bilibili.com/video/BV12V411f7GJ
有的学校用的是,陀螺仪快速响应,有的用的是利用无减速箱(无空乘)电机,通过它的磁编码器反馈角度来调好云台。
这个,都可!不过有个大前提,你必须清楚你们云台用的是什么电机!
一般是无刷直流电机,6020,6623无空乘,非减速电机。有减速齿轮箱的电机3508,3510甚至,2305电机。
在这里我先说,常用的6020,6623等非减速电机。有减速齿轮箱的减速电机,又会涉及到陀螺仪,比较复杂,之后再加补充。
我这就想来个简单的。
6020,6623类的非减速电机(无空乘)。
不说了直接上图。(你看着文字类,我还觉得打字累呢(手动滑稽.jpg))
见图,6020类闭环云台图。
云台有一个里的作用以抵消外界给它的力,这便是速度环。
速度环+位置环,便能让云台快速响应,又有一定力的维持在预设角度位置,可谓是又快又稳又有力量。
说白了它其实是,一个同比放大误差的,达到快速响应的目的。
想更多了解,可去到B站搜索up机甲大师,链接:https://www.bilibili.com/video/BV12V411f7GJ
有的学校用的是,陀螺仪快速响应,有的用的是利用无减速箱(无空乘)电机,通过它的磁编码器反馈角度来调好云台。
这个,都可!不过有个大前提,你必须清楚你们云台用的是什么电机!
一般是无刷直流电机,6020,6623无空乘,非减速电机。有减速齿轮箱的电机3508,3510甚至,2305电机。
在这里我先说,常用的6020,6623等非减速电机。有减速齿轮箱的减速电机,又会涉及到陀螺仪,比较复杂,之后再加补充。
我这就想来个简单的。
6020,6623类的非减速电机(无空乘)。
不说了直接上图。(你看着文字类,我还觉得打字累呢(手动滑稽.jpg))
见图,6020类闭环云台图。
文章标签
请问这篇文章对你有用吗?
【求助帖】云台-双环PID(增量型)控制