【RM2021-飞镖发射架资料开源】北京科技大学
39570
1
9
2021-08-19
本帖为北京科技大学Reborn战队—RM2021赛季最新参赛版本的飞镖发射架资料开源,包含飞镖的测试视频、重心仿真、风阻仿真以及机械结构资料和实战资料。
写在前面的一些话:
作为今年才参赛的新兵种来说,飞镖机器人的技术还不够成熟,在大多数队伍包括我们,它还没有真正被纳入战术范围内,我们希望通过这篇帖子来促进飞镖机器人的发展和交流,让它真正作为一个真正的核心武器来出现在RoboMaster的赛场上。
特别鸣谢:沈阳航空航天大学 对我们提供的帮助和技术交流;以及 RM不忘初心飞镖技术交流群 的技术交流支持。
我们实际测试单次四连发最高命中率在75%左右(在激光已经校准的情况下) 正常情况下16m弹道不会偏出一块小装甲范围内,但第四发命中率会略低。
实战中激光校准后单次四连发最高命中率在50%左右,因为取消了适应性训练,所以飞镖调整了几场后才命中前哨站(北京科技大学vs南昌大学),一发被识别为大弹丸伤害,一发被识别为飞镖伤害,造成了1000+伤害,帮助我们队伍在反击端取得了一定成效。
我们目前实现的发射架功能包括16m及28m对前哨站及基地的打击以及切换打击目标功能、稳定的换弹能力 以及 Pitch轴和Yaw轴的角度调整功能。
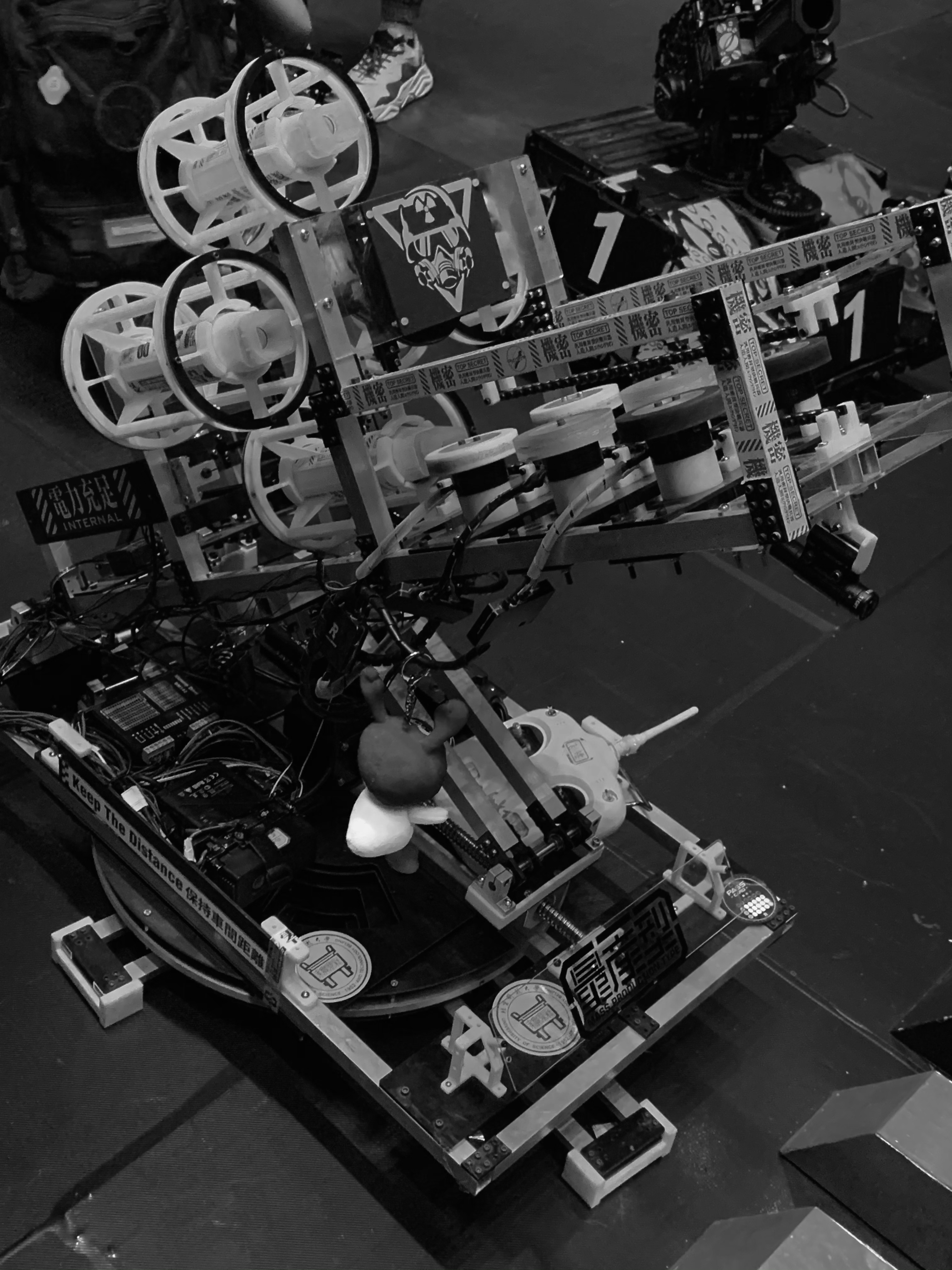
这是我们的实际效果图
开源文件附上
链接:https://pan.baidu.com/s/1O3kDFlBL8nb8sNghQ3h8jw
提取码:rkxt
这是我们的实际效果图
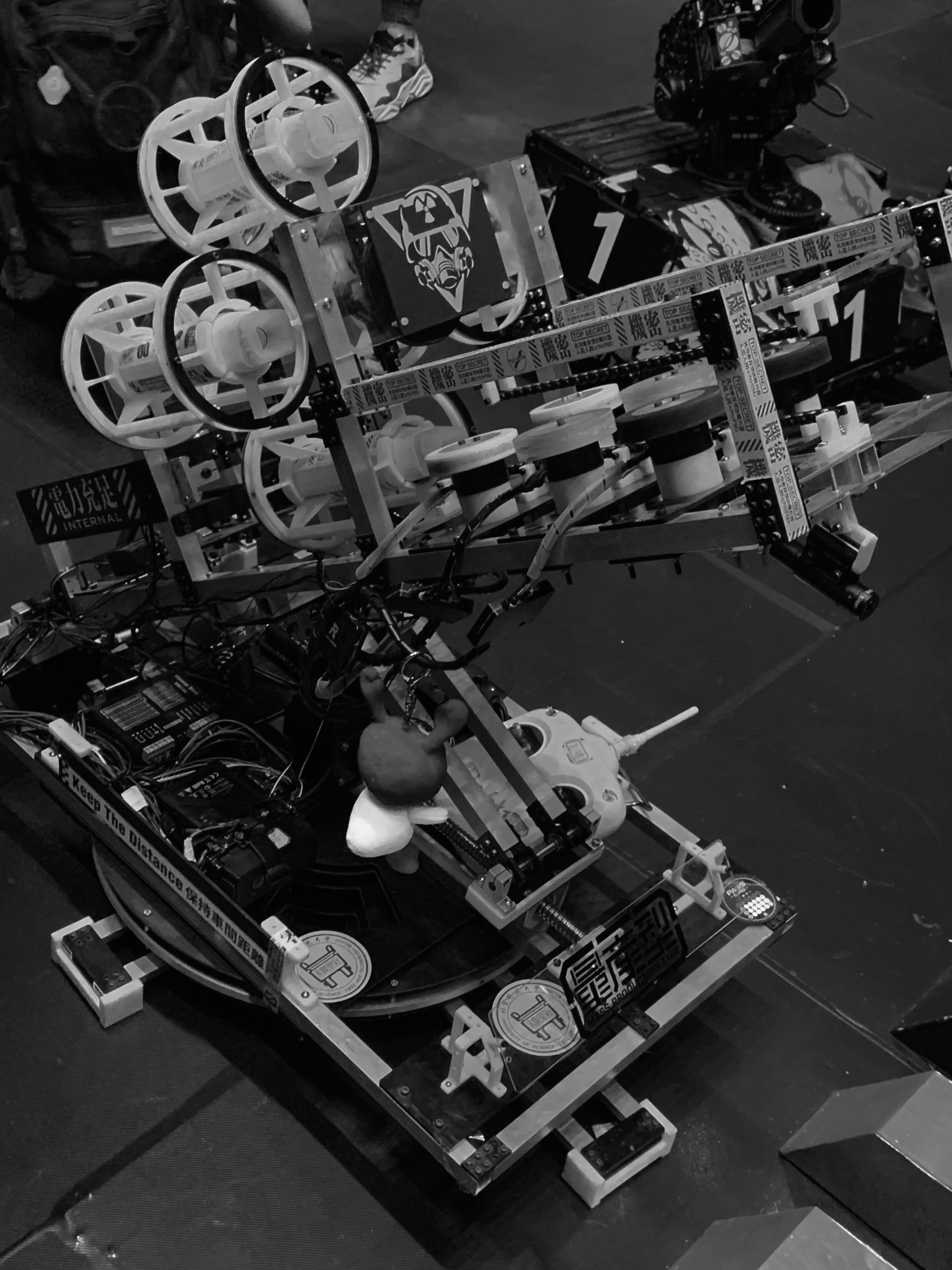
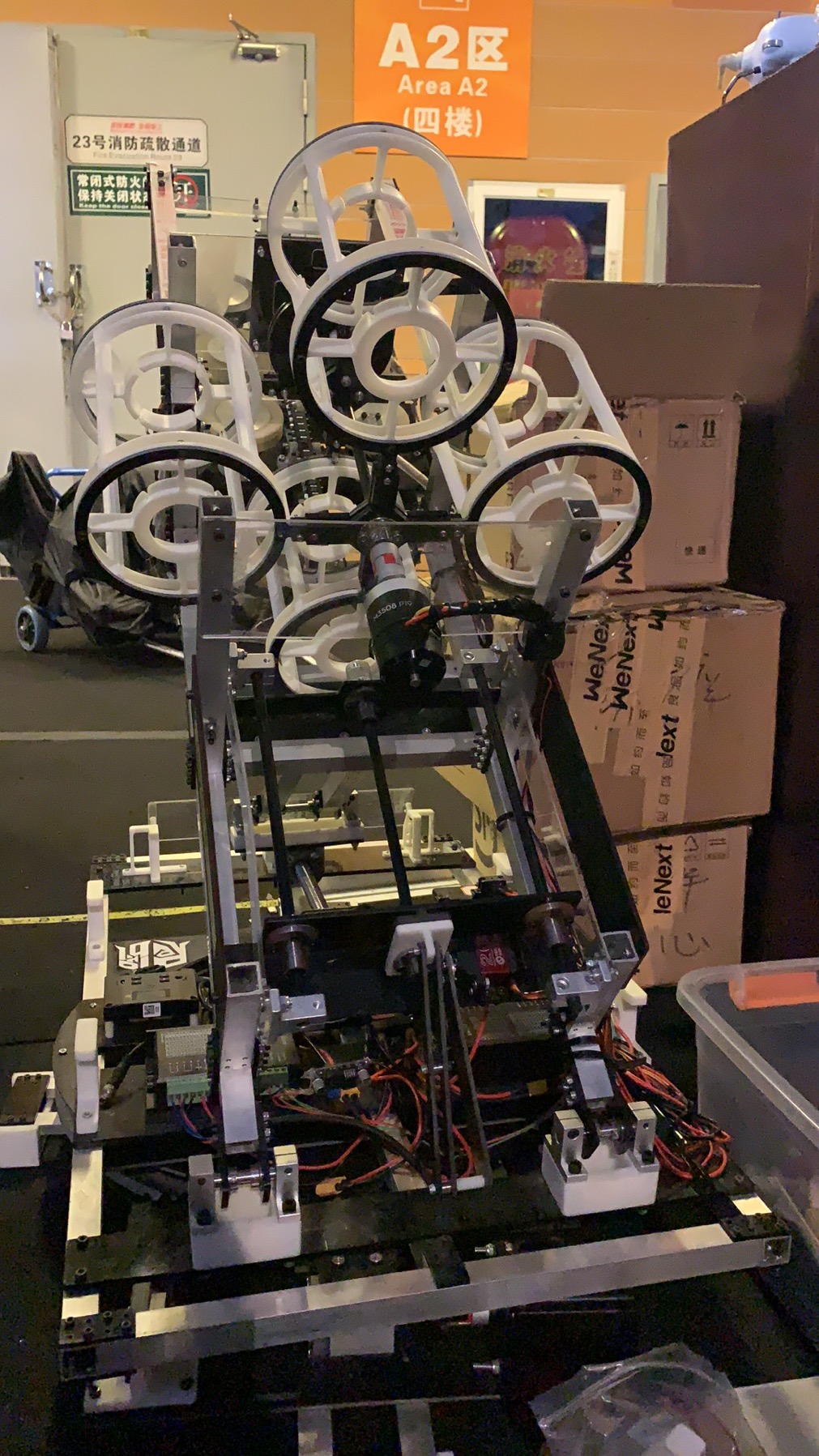
发射动力是三级摩擦轮,轨道是微轴承组成的滑轨,摩擦轮直接接触飞镖本体,出射姿态良好,我们的调整方法是控制仰角为36度左右,调整摩擦轮转速。在第一发打中下装甲板后三级摩擦轮转速均上升10,即命中上装甲板。仰角超出37度即有较大可能击中飞镖舱门上方。
飞镖弹体是3D打印件材质,有摩擦轮槽和滑动槽保证面接触,飞镖翼是可拆卸更换的拼插翼,摔坏了只需要更换尾翼即可,无动力无制导有仿真,弹道偏移很小,在尾翼不意外脱落情况下均为稳定抛物线,飞镖头先触地。
换弹部分是旋转换弹+舵机曲柄滑块推出,为防止旋转时角度不准确以及反复震荡,我们设计了棘轮棘爪结构,保证每次旋转均为90度,且不发生震荡,换弹稳定,具体测试视频见开源文件。
Pitch轴角度调整为滚珠丝杠+步进电机,Yaw轴角度调整为滚珠丝杠+步进电机+大餐桌轴承+齿轮齿条,餐桌轴承安装齿轮,丝杠带动齿条直线运动从而带动齿轮旋转。
一些心得分享:
北部赛我们使用的是皮筋为动力的喀秋莎式飞镖(即四面同时拉满然后旋转发射),皮筋的缺陷很明显,不好调整射速,皮筋容易氧化损坏,受温度影响很大,需要挑选合适的皮筋,不然很容易导致射程不足或者拉力过大,更换皮筋极其复杂尤其是四面皮筋。而且皮筋需要搭配一个装载飞镖的轨道和滑块,这样徒增了需要加速的质量,而且需要一个可靠耐用的缓冲减震装置,如果减震做的不好就会导致飞镖出射姿态发生偏移,甚至翻转,这也是我们为什么北部赛后全部推翻重新设计飞镖的重要原因之一。我认为能否省掉减震和滑块是飞镖设计的重要一步。
其次关于飞镖校准问题,不知道大家有没有感觉到自己身处红方的时候,对方蓝色前哨站的灯光太亮了,导致很难看清激光点。以及如果有好的激光校准方法希望大家可以分享一下
开源文件附上
链接:https://pan.baidu.com/s/1O3kDFlBL8nb8sNghQ3h8jw
提取码:rkxt
使用者需注意:
1.本次开源飞镖机器人资料,出自北京科技大学机器人队。作品仅用于技术交流,未经作者允许,不得作任何商业用途。
2.转载须注明作品出处,未经作者允许,不得转载至任何公共空间。
3.本作品的声明以及其修改权、保护作品完整权及最终解释权均归北京科技大学Reborn战队所有。
文章标签
请问这篇文章对你有用吗?
【RM2021-飞镖发射架资料开源】北京科技大学