【RM2021-雷达站算法部分开源】上海交通大学-云汉交龙战队
46378
0
2
2021-08-27
本帖为上海交通大学云汉交龙战队RoboMaster2021赛季雷达系统开源贴
使用者需注意:
1.本开源仅限于RoboMaster参赛队之间队内交流使用,不得用于任何商用行为,开源者保留采取一切法律措施的权利。
2.开源目的在于加强参赛队之间交流,尤其是帮助新队伍在有限的条件下使不同的技术部门齐头并进、快速地成长起来享受比赛。
3.本开源的最终解释权为上海交通大学云汉交龙战队所有。
github传送门链接
技术报告
雷达站我们这一年主要完成的是测距定位功能,尝试了很多方法,包括ZED相机,双目,到最后的激光雷达,此外还有不断的训模型。中间花了很多时间踩坑,尝试方案,放弃,最后回到原点的朴素方法,嘿,竟然可行。希望我们的工作能作为大家雷达站项目的基础框架,然后在这之上去探索一些更加有趣的项目,雷达站是一个上限非常高的项目,高到不可想象。毕竟全自动化机器人是所有做机器人的人的梦想与动力。
答疑群:701432637 欢迎交流和指出bug
###########################
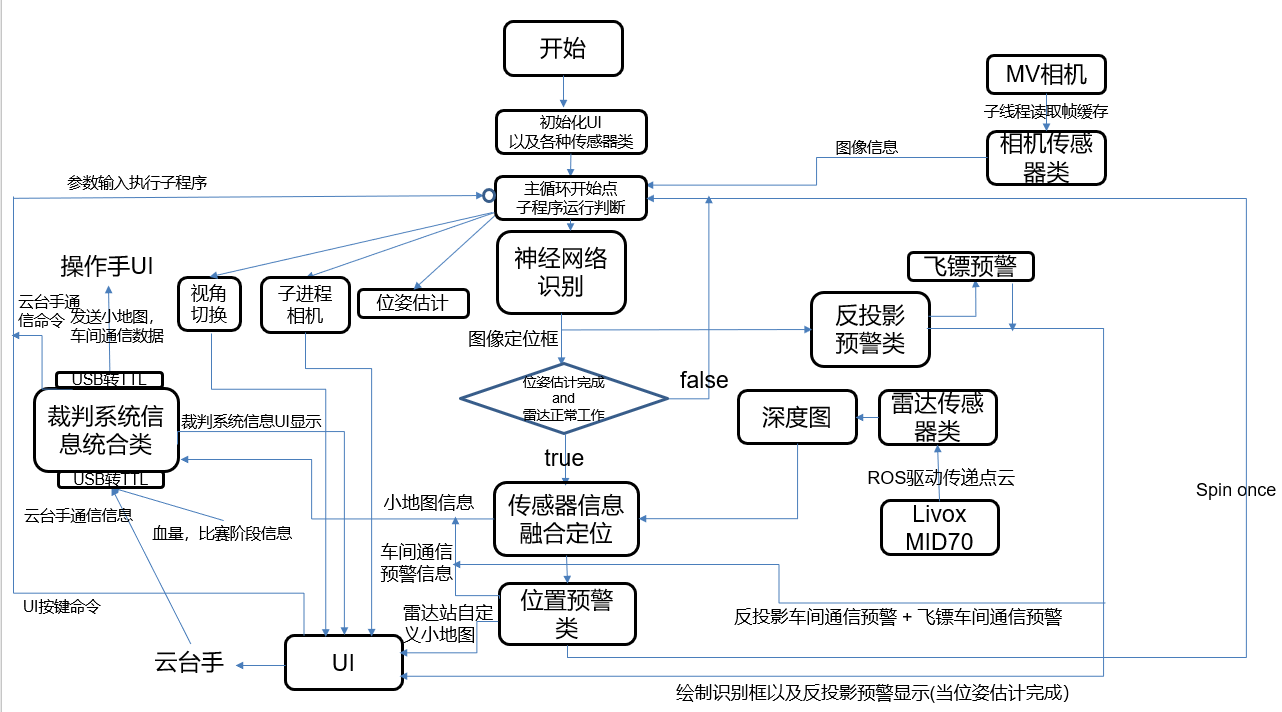
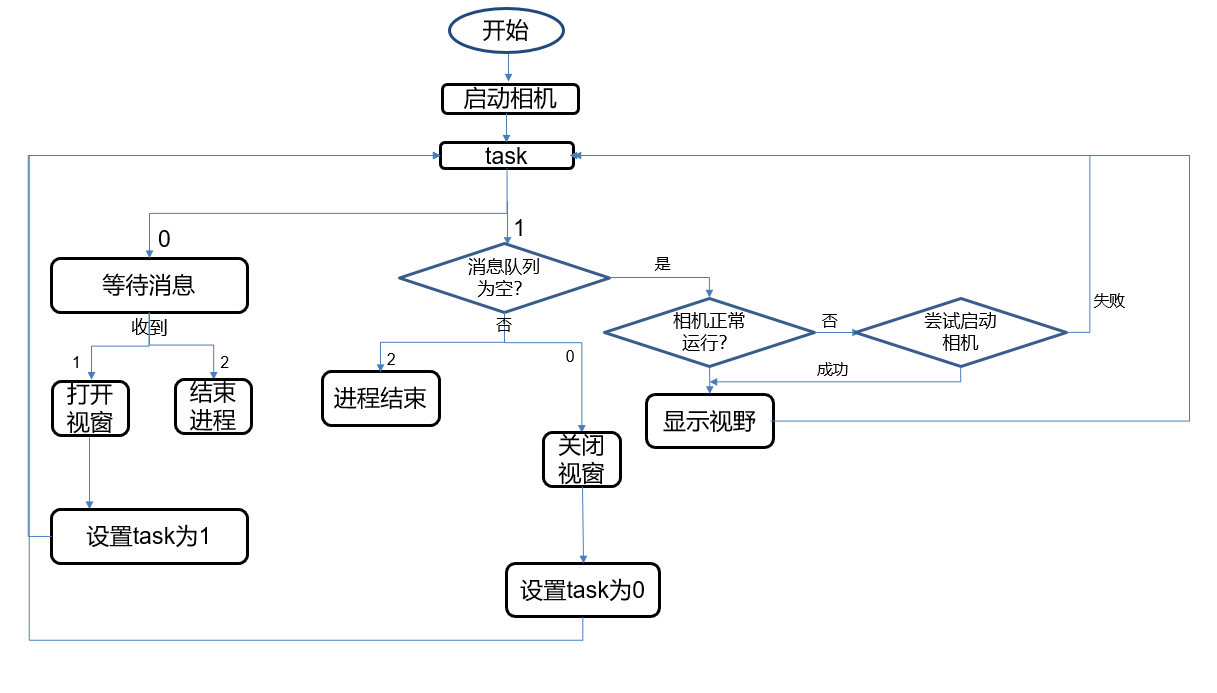
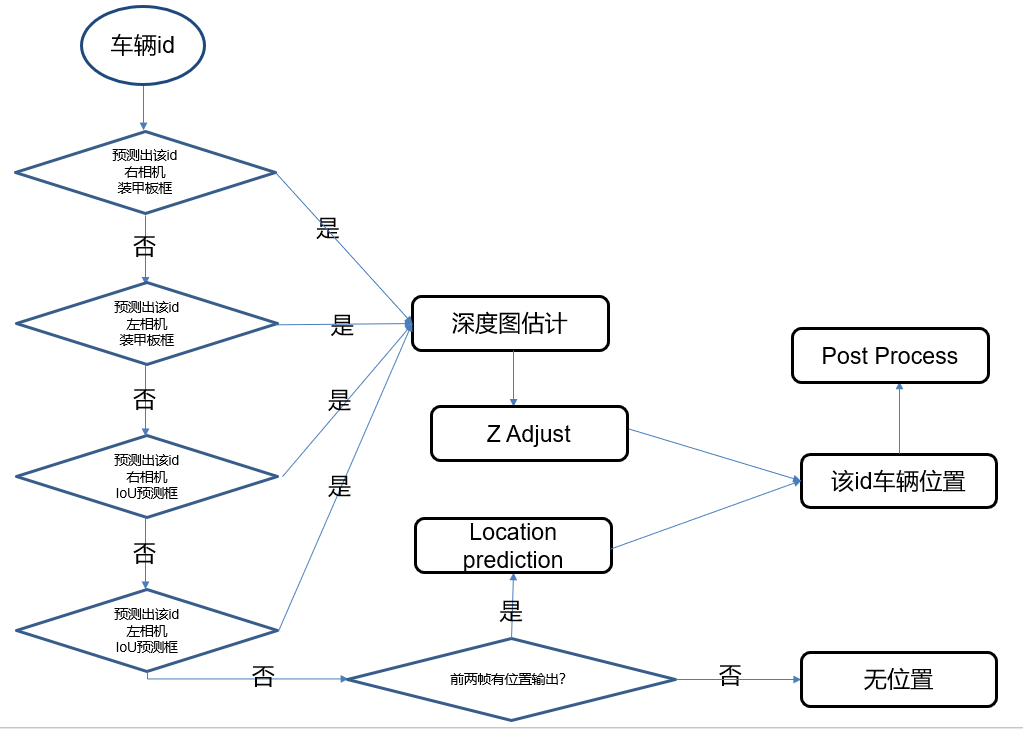
附:雷达站程序关键部分流程图
使用者需注意:
1.本开源仅限于RoboMaster参赛队之间队内交流使用,不得用于任何商用行为,开源者保留采取一切法律措施的权利。
2.开源目的在于加强参赛队之间交流,尤其是帮助新队伍在有限的条件下使不同的技术部门齐头并进、快速地成长起来享受比赛。
3.本开源的最终解释权为上海交通大学云汉交龙战队所有。
github传送门链接
技术报告
雷达站我们这一年主要完成的是测距定位功能,尝试了很多方法,包括ZED相机,双目,到最后的激光雷达,此外还有不断的训模型。中间花了很多时间踩坑,尝试方案,放弃,最后回到原点的朴素方法,嘿,竟然可行。希望我们的工作能作为大家雷达站项目的基础框架,然后在这之上去探索一些更加有趣的项目,雷达站是一个上限非常高的项目,高到不可想象。毕竟全自动化机器人是所有做机器人的人的梦想与动力。
答疑群:701432637 欢迎交流和指出bug
###########################
附:雷达站程序关键部分流程图
文章标签
请问这篇文章对你有用吗?
【RM2021-雷达站算法部分开源】上海交通大学-云汉交龙战队