【分享帖】工程机器人
nautilus fw
837
0
2
2020-12-16

算是工程做叉车的想法吧。
一个爪子同时去做两个任务,障碍块和矿石。主要结构和传统看起来差不多。
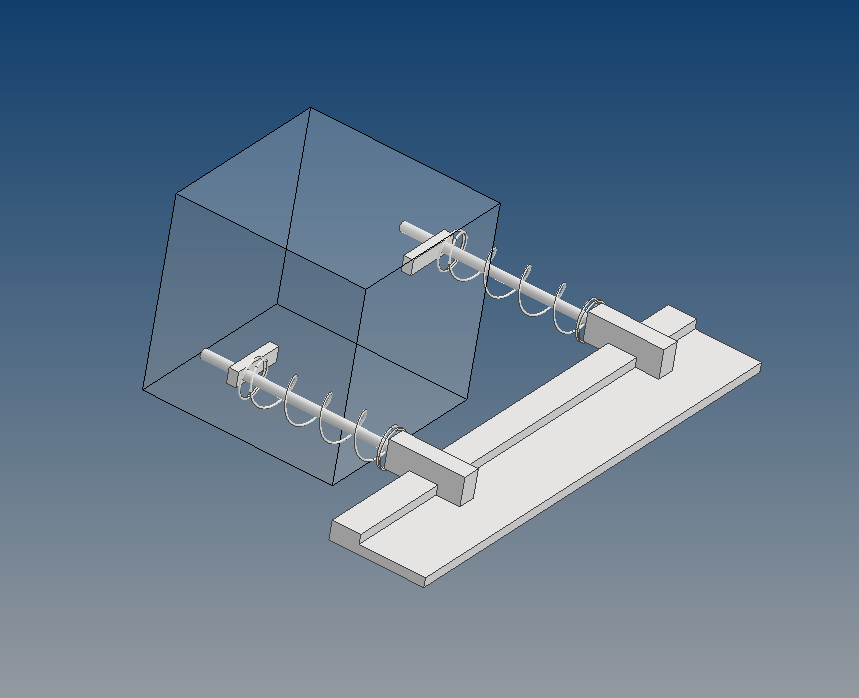
第一张图为搬运障碍块,二图为抓矿石(传统操作)
一图:工作流程为利用车里自身的动能等,将两个爪子的前端插入障碍孔的洞里面,此时弹簧会压缩,前端插进孔里面,有个两个问题是:
1、假如障碍块后面没有倚靠的物体时候,弹簧不能压缩的问题,是不是可以考虑做成可以控制伸缩的;
2、为啥要伸缩,个人就是为了体积小,减少翻转等动作时候的惯量。
当弹簧压缩,爪子加紧后,可以给它进行各种位姿调整,当要放置障碍块的时候,由于爪的夹紧力减小或者消失,弹簧会助力障碍块的脱离动作
二图:为了一爪两用,爪子不得不进行加宽,假如采用的是气缸加紧的话,障碍块的孔距为500mm,气缸本体长度的也得500mm左右,这就对了矿石(200^3)抓取造成了影响,所以弹簧前端的两个挡块可以考虑向内加长,这样的可以解决这个问题。
(仅仅是个人想法哈,图随便画的,大佬轻喷)
(有想法的大佬可以带带我:lol)
文章标签:
请问这篇文章对你有用吗?
【分享帖】工程机器人