【RM2024-工程机器人机械电控开源汇总】华北理工大学-Horizon
本帖最后由 WIDPEA 于 2024-6-30 12:29 编辑
本贴为华北理工大学Horizon战队2024赛季工程机器人机械电控开源汇总贴
一、前言
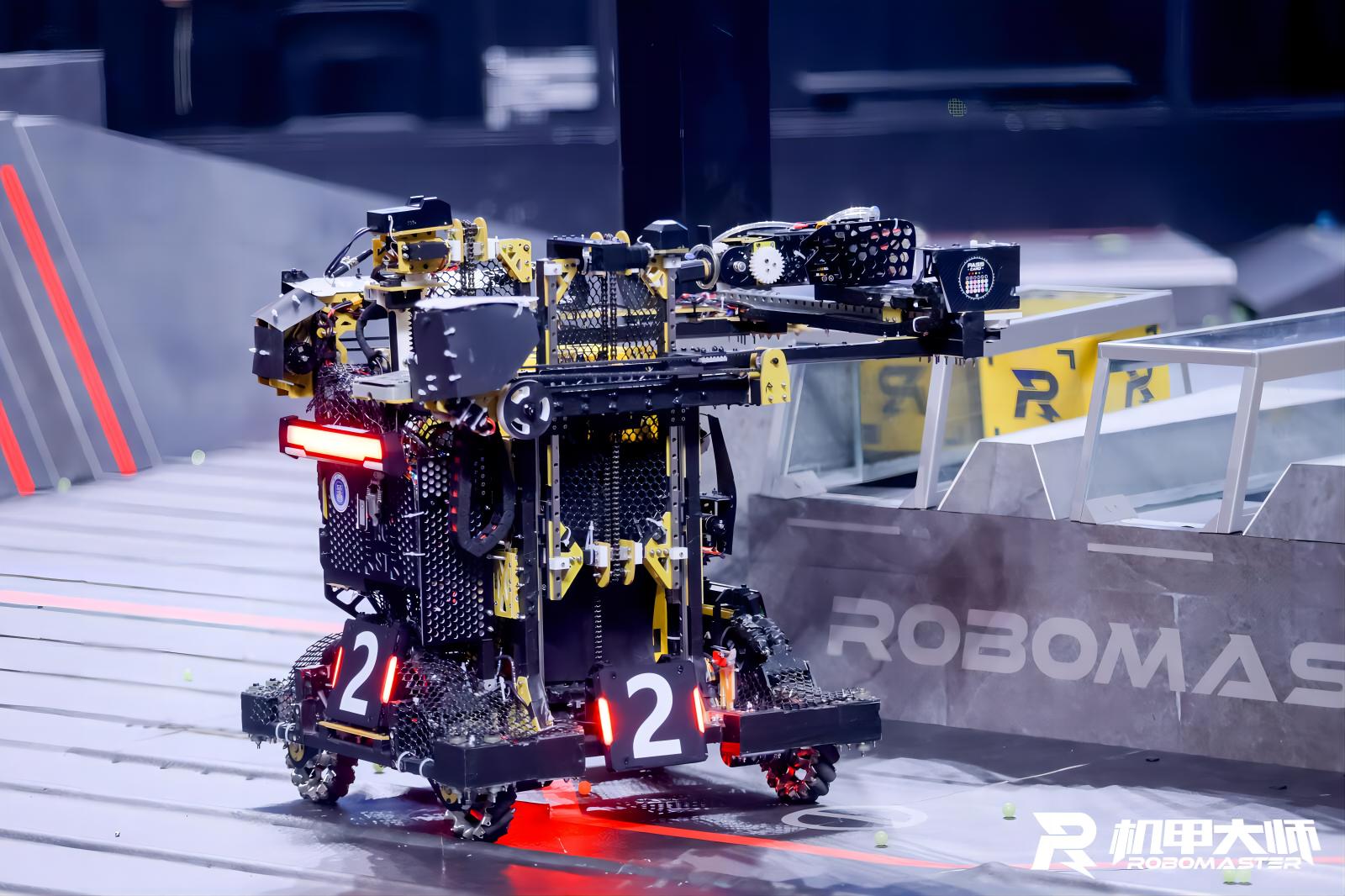
本赛季工程机器人主要采用龙门架+直线横移机构+低自由度机械臂的方案,能取大资源岛矿石和小资源岛矿石,一次可携带三个矿石,有视觉转矿功能,可以稳定兑换四级矿石。本车造价在一万二左右(不包括TX-2电脑),机械从测试到研发总造价在五千元左右,此外,我们工程组主要研发团队只有两个人,传统的机械+电控阵容,双人成行,但我们的工程机器人在场上性能佷稳定,所有的时间点把握的恰到好处,虽然没进国赛,但也是十分值得回忆的旅程。
在此次开源中,我们特地上传了工程机器人的三维图纸、详细技术讲解以及电控的代码,可以说配套十分的完整,非常适合资金有限以及新队伍参考使用。另外将自己的座右铭送给每一位加入以及即将加入RoboMaster赛事的同学:
在群星璀璨之中,取得你的一席之地。


二、开源资料
提取码:f7pm
--来自百度网盘超级会员V2的分享华北理工大学Horizon战队2024赛季工程机器人开源资料相关说明:
1.电控代码:整车由两块STM32F427主控控制,分为主机和从机。从机控制底盘和转矿;主机控制取矿机构;两块主控之间由串口进行通信。在压缩包中主机为F4_Master,从机为F4_Salve。另外包含两套自定义控制器代码,(1)为现行版本,(2)为探索版本,(2)尚不可使用。(1)为一块C板与一块F1采样板,采样板负责采集摇杆数据,C板负责接收采样板的数据并解算板载陀螺仪的数据,并汇总这五轴是数据通过裁判系统的协议发送出去。最后,感谢小瑞同学遗传的代码。
2.二维图纸:文件夹内是自己使用雕刻机雕刻板材以及部分铝件的加工图纸,仅供参考。
技术文档:文件夹内是工程机器人的技术报告,包括了整车的所有技术内容,以及测试研发记录,还有一张我寒假在线上给新生培训用的带传动原理图,其中包括了二级抬升的原理讲解图。
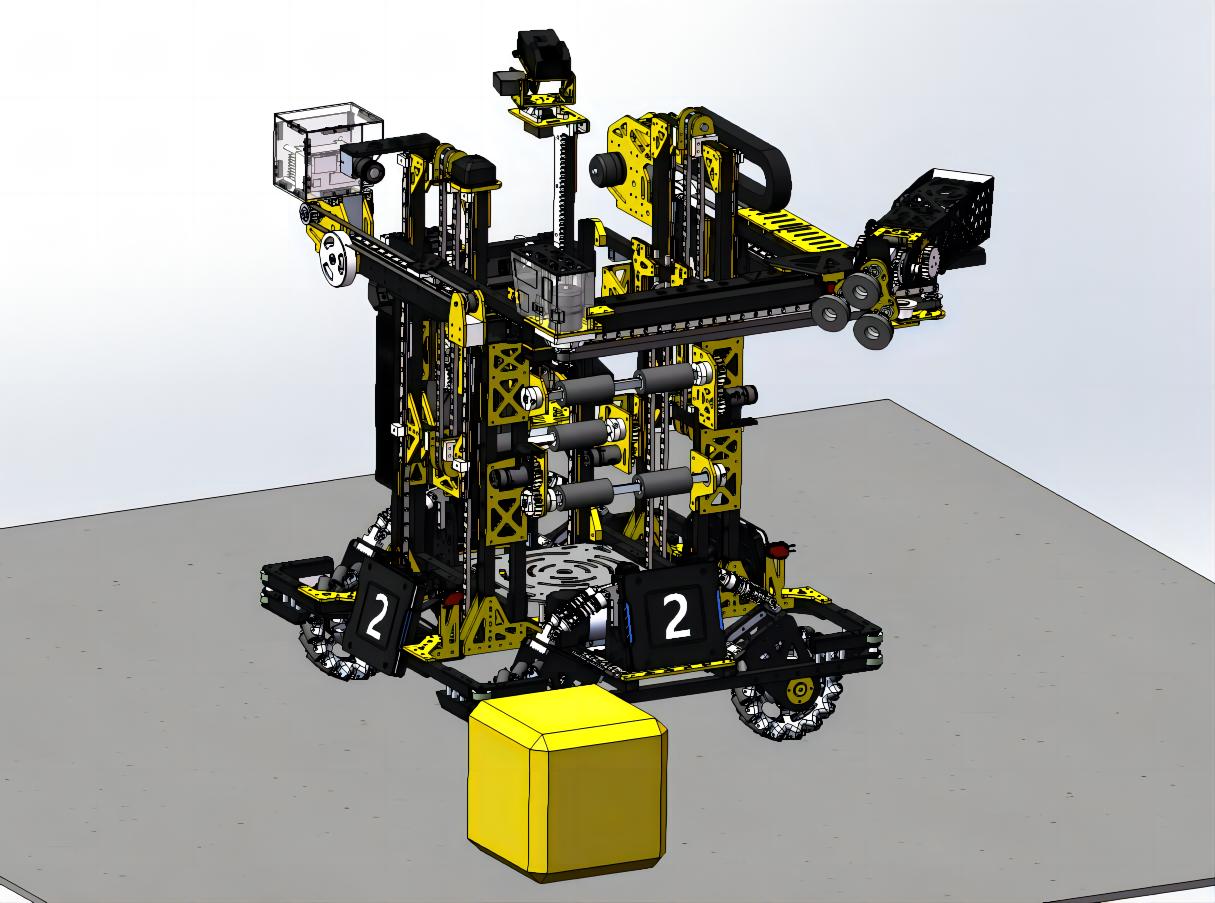
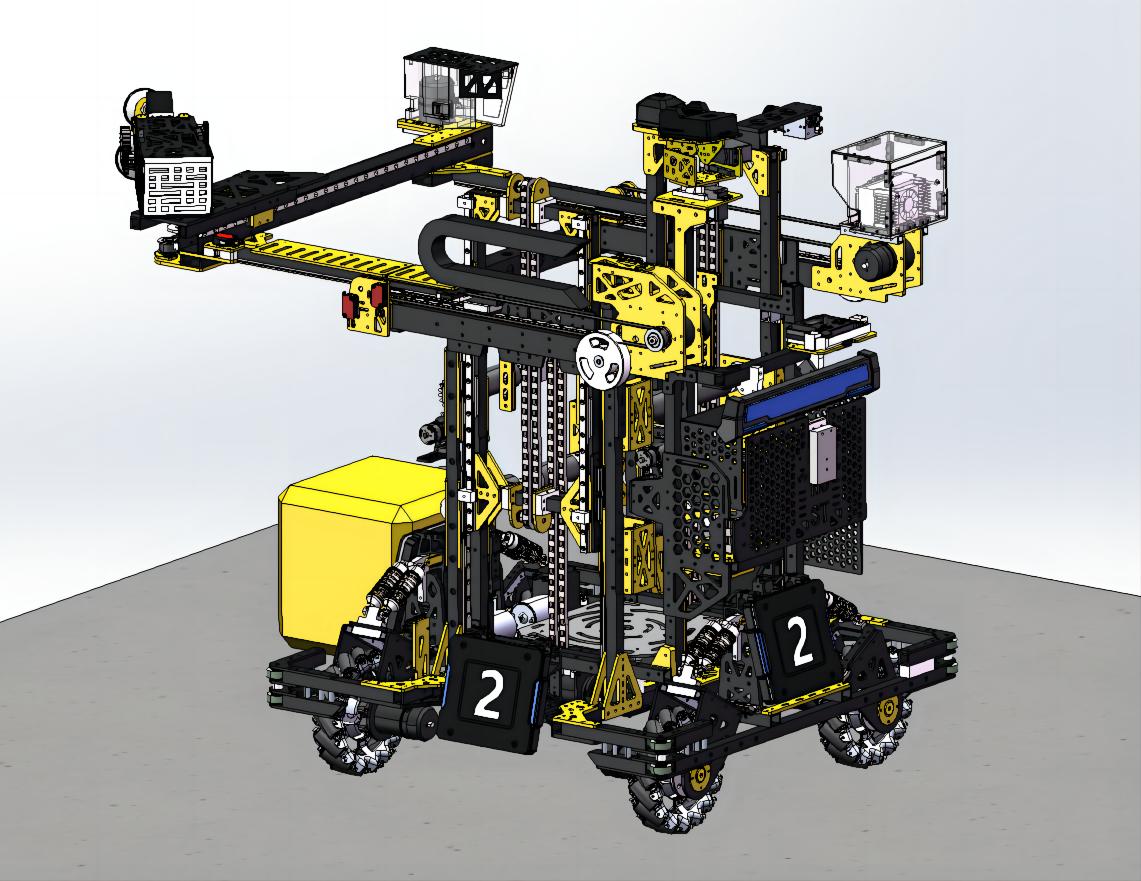
3.三维图纸:文件夹内是的工程机器人的三维图纸以及自定义控制器的三维图纸,有step和sldasm两种格式的图纸。压缩包内是sldasm的源文件,总装配体名称为“NCST-工程总装”,作者使用的solidworks版本为2021版,请使用2021或更高的软件版本打开。
4.效果展示:文件夹内是一个工程机器人的取大资源岛矿石和小资源岛矿石,以及中期考核兑换高级矿石的视频。
三、声明
1.本次开源项目出自华北理工大学Horizon战队,作品仅用于技术交流,未经作者允许,不得作任何商业用途。
2.本次开源文件的最终解释权归华北理工大学Horizon战队所有。
3.开源目的在于加强参赛队之间交流,有助于提高自身和其他参赛队的水平。
请问这篇文章对你有用吗?
【RM2024-工程机器人机械电控开源汇总】华北理工大学-Horizon