【分享帖】关于弹道的一系列经验分享
随着比赛的逐渐发展,各个队伍的优秀开源,大家的弹道也变得越来越好了,本人在做rm期间对弹道这方面研究颇多,如今成功退休,作这一篇经验贴,希望能够帮助到大家,祝愿大家弹道越来越好。
对于rm圈来说,目前已知的且有良好应用背景的发射机构有大致如下四种:1、摩擦轮,2、皮筋,3、复合弓,4、气动;但在已知的上场效果来看,该2、3、4机构牺牲了大部分的射频,但相对于大部分摩擦轮机构来说弹道稳定许多,为什么会造成这样的原因?传统意义上的摩擦轮在保留射频基础上,也可不可以像其他三种机构那样,弹道得到优化?(2、3、4的相关机构设计可以参考如下开源或视频【新提醒】【RM2022-年度技术突破奖-吊射英雄开源】深圳大学RobotPilots【RoboMaster论坛-科技宅天堂】、【RMUC 2023青工会技术答辩-上海交通大学-复合弓飞镖发射机构设计】https://www.bilibili.com/video/BV1Zh4y1S7Wd?vd_source=4501cafb51348d7194441e6d1c720ac7、【新提醒】【RM2023-气动英雄开源】华南农业大学-Taurus战队【RoboMaster论坛-科技宅天堂】)
我们先从其储能方式以及能量转换的方向分析,对于摩擦轮来说,弹丸的动能是由摩擦轮的动能,通过摩擦力传递给弹丸;对于皮筋,是通过皮筋的弹性势能直接转化为弹丸的动能;与皮筋类似,复合弓在运行的过程中是通过复合弓的弹性势能转变为弹丸的动能;对于气动,则是通过气体的内能带动气缸转化为气缸和弹丸的动能。从以上分析,2、3、4能量传递的方式相对直接,并没有太多的中间过程,也意味着在使用该3种机构时,影响弹道的因素会更少,所以控制好一定的变量,便能够将弹道控制在较小的浮动范围内。
其次是机构运行方式,在摩擦轮发射机构运行过程中,通过摩擦轮的旋转,将速度传递给弹丸,2、3一般都会将弹丸约束在直线轨道上通过储能机构对其进行加速,4是通过气缸对弹丸进行直线加速,且2、3、4加速行程,相对于1来说都要长很多,也就意味着做功时间要长一些,在将一个目标加速到同一个速度时,2、3、4的机构无疑会多很多的容错。
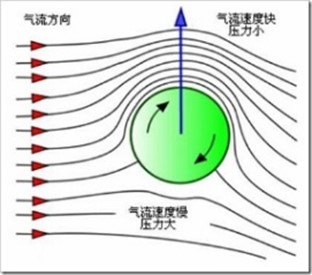
再有便是摩擦轮机构运行的目标,是将其转动动能转换为目标直线运动的动能,若目标是一个弹丸,则需要对弹丸进入摩擦轮之前的位置严格约束在两摩擦轮的中心线上,否则,在进行加速的过程中,极有可能会因为两个摩擦轮的掉速不一致而出现弹道散布大的问题,且不谈出射方向极有可能因此而偏离,这样也会赋予弹丸一个转动动能,这个转动能可能不大,但却会使得弹丸引起马格努斯效应(图1),及在飞行的过程中向一侧发生偏转,且其在直线上的动能也变得不稳定。
综上分析,我们可以了解到影响摩擦轮弹道稳定性的因素大概率为如下两个方面:
①由于进入摩擦轮时的位置偏差导致弹道散布。
②由于出射速度的误差导致弹道散布大。
那么接下来该如何优化弹道呢?
目前来说主流的就是加装预制机构来对弹丸的位置进行约束,但预制机构也分为两种,一种为非主动的预制,而另一种为主动的预制(俗称二级播蛋或拨叉),当然第一种设计起来结构会更加的紧凑、轻便,且不会在电机层面给电控的同学带来麻烦,但是第二种就没有优点吗?答案当然是否定的,非主动的预制虽然在结构上更紧凑了,但却并在被动的限制弹丸位置,随着规则的改动大家的链路越来越长,这对于拨盘电机来说无异于一种负担,如果说过硬的预制,则可能导致拨蛋不顺畅,射频上不去,预制过软,则可能会在运动的途中出现漏蛋的情况。主动预制便不会有这样的问题。当然以上两种预制都可以减小①引起的弹道散布,那么②引起的散布如何去规避呢?其实,如果考虑最理想的状态,我们期望的弹丸速度应为图2中的v=wL
(其中w为摩擦轮角速度,L为摩擦轮中点到两摩擦轮中心的距离)。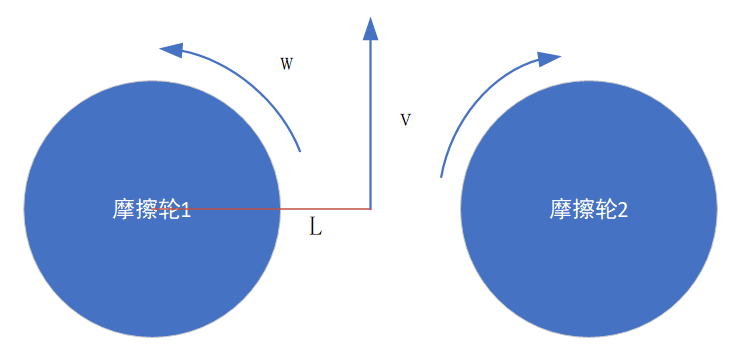
但在摩擦轮接触一个低速的弹丸时,都会发生打滑的现象(这也是为什么打时间长了弹丸会变得麻麻赖赖),由于在加速初期弹丸跟随不了摩擦轮的转动速度,自然也就出现了打滑,这样也很容易导致弹丸加速不到理想速度便射出,事实也是这样,单纯一级的摩擦轮在加速大弹丸时,很难将大弹丸加速到理想速度且误差会较大,计算我们设定的速度(上述速度v
),再通过与测速模块得到的速度对比就能知道这一点;当然照着这个思路,既然一级加速不行,那就再多一级加速,也就是二级加速,及采用下图构型可以很大的减小这个误差(如图3,图4为该构型场上表现)。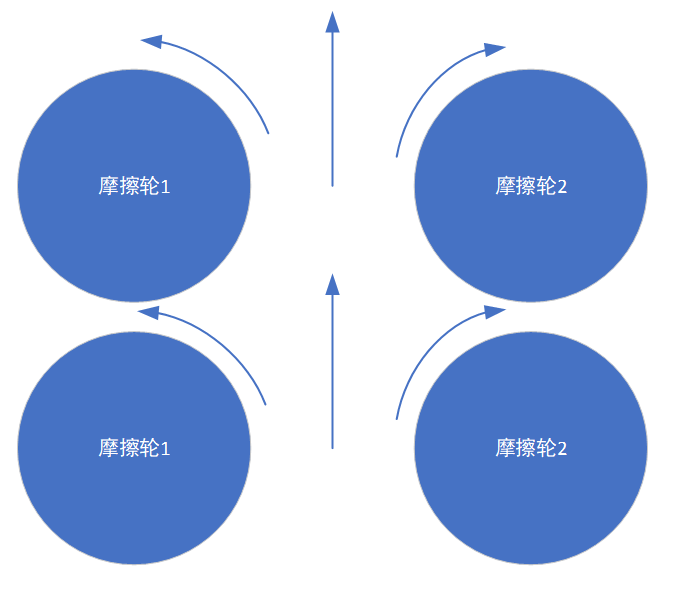

但随之而来的会有另外一个问题:倘若弹丸在一级加速之后有一个微小的转动动能,那么在第二级加速过后便会将这个动能放大,就会使马格努斯效应变得更加严重,那么该现象该怎么减小呢?这就要回到我们的预制的设计,如果加大预制对弹丸在水平方向(图5左所示方向)的阻力,那么便可以使弹丸在接触摩擦轮时增大自旋方向的阻力,从而实现减少自旋,但若是使用非主动预制的话会增大拨盘阻力,故若采用主动预制来配合机构,可以减少这一负担,且采用主动预制亦可以给予弹丸一个相较稳定的初速度(图5右所示),使得出射速度更稳定,当然前提是提高预制的定位精度(这里推荐大家使用触发行程较小的微动开关或者其他到位检测元件)。
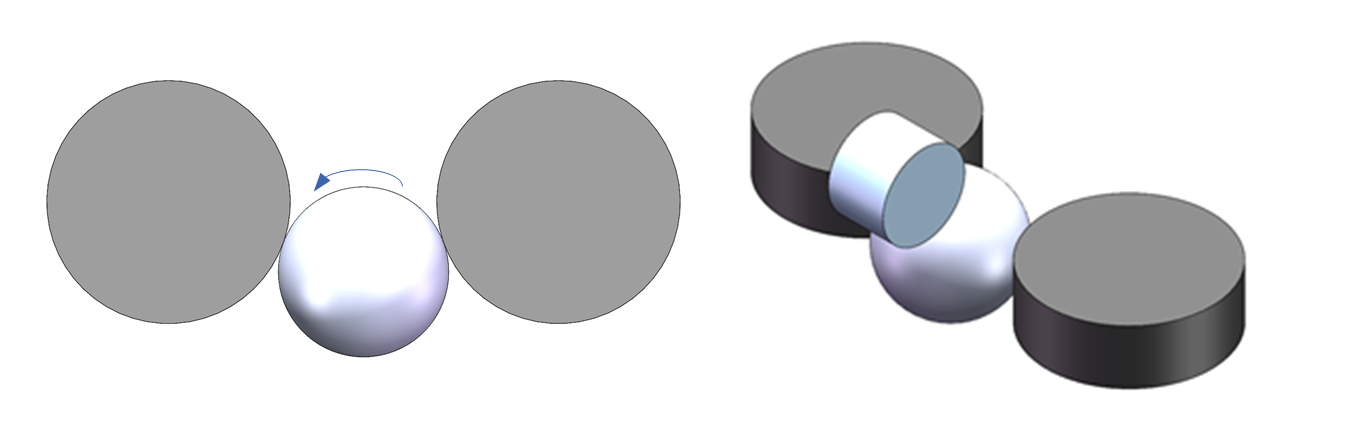
那么有没有其他办法来减小该问题,当然是有的,倘若采用图6构型,将第二级摩擦轮的方向偏转90度,那么第一组摩擦轮造成的转动动能便会因为第二组摩擦轮对弹丸在该方向的阻力减小,而不是增大,但相应的在预制弹丸时精度要求更高,本来将其约束在一个平面便可以,但采用该构型时,需要将弹丸中心约束在一条轴线上,由于官方弹丸大小的问题,这也使该问题在目前版本难以解决。
发射机构本身作为车内要求精度较高的机构,这部分需要尽量提高零部件的加工精度,在做设计的时候需要保证结构刚度,且设计时选取的基准要尽量准确。
以上便是该篇经验贴的全部内容,希望对大家有用。
(该篇所述构型都为本人所在参赛队大弹丸所采取的构型,大道相通,设计小弹丸机构以及飞镖机构也都可参考)
(本人码字能力较差,没有表述完整的地方,希望大家批评指正)
请问这篇文章对你有用吗?