【分享帖】如何优雅地翻车
在赛场中,不乏由于翻车而输掉比赛,比如某科和某工大的比赛中,由于英雄机器人翻车,导致比赛形势恶劣。赛场中,机器人的翻车与操作手的不正当操作有很大关联,但也是由于机械设计上的缺陷,以及嵌入式控制缺乏防范也有关系。那么我们对机器人一个普通的运动过程进行一些简单分析,简单讨论一些翻车背后的机理。
1.四轮着地的简单加速度受力分析
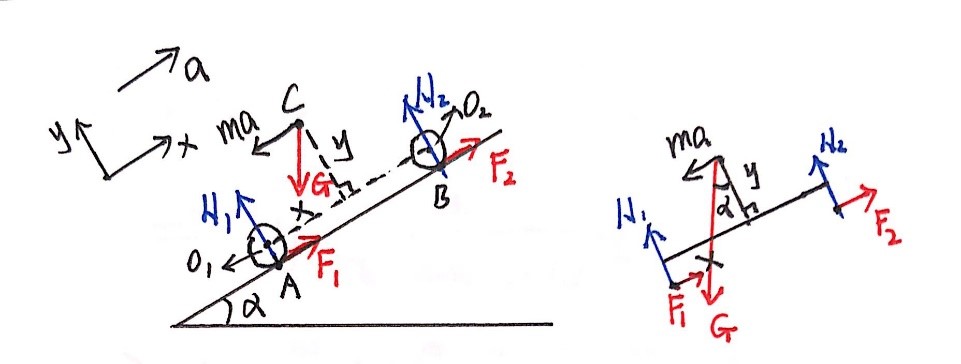
我们简单假设机器人在一个斜坡上运动,取沿斜面向上的方向为正方向建立平面直角坐标系,如果方向向上即为正,向下即为负,对加速度同理。N1, N2 分别为前后轮受到地面的支持力,支持力为0 即代表车轮与地面脱离,车身即将翻转;F1 , F2 分别为机器人受到的驱动力,驱动力来源于地面对轮子的静摩擦力,在不打滑的时候,与电机扭矩成正比;打滑时临界值的最大静摩擦力和轮子对地面的压力成正比。受力分析图如下:
1.四轮着地的简单加速度受力分析
我们简单假设机器人在一个斜坡上运动,取沿斜面向上的方向为正方向建立平面直角坐标系,如果方向向上即为正,向下即为负,对加速度同理。N1, N2 分别为前后轮受到地面的支持力,支持力为0 即代表车轮与地面脱离,车身即将翻转;F1 , F2 分别为机器人受到的驱动力,驱动力来源于地面对轮子的静摩擦力,在不打滑的时候,与电机扭矩成正比;打滑时临界值的最大静摩擦力和轮子对地面的压力成正比。受力分析图如下:
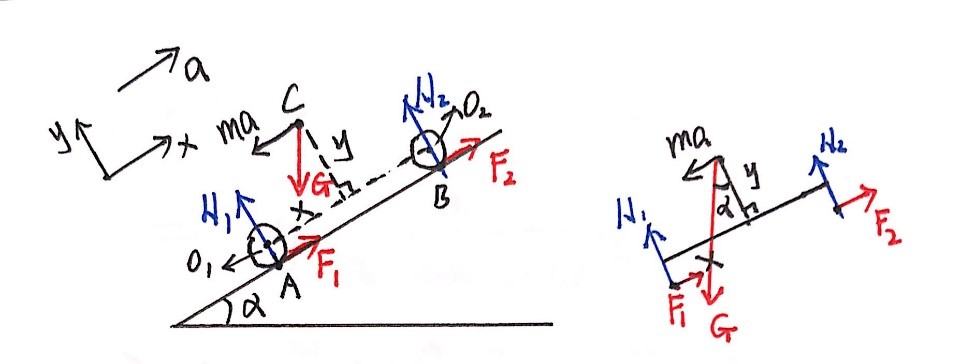
假设在有加速度的情况,前后轮电机扭矩相同,麦轮的转动惯量为I0,角加速度为β,可以根据达朗贝尔原理来计算,
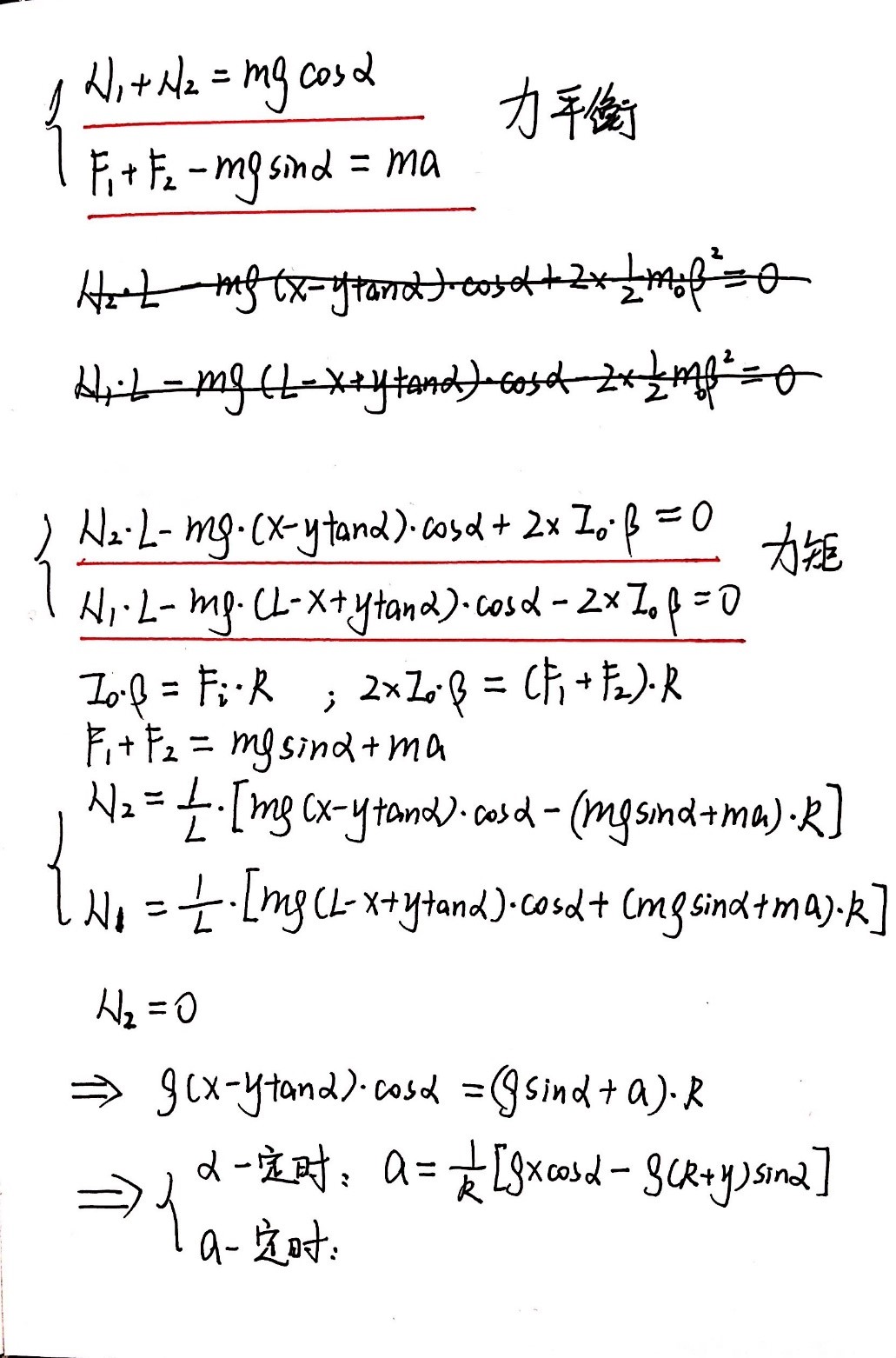
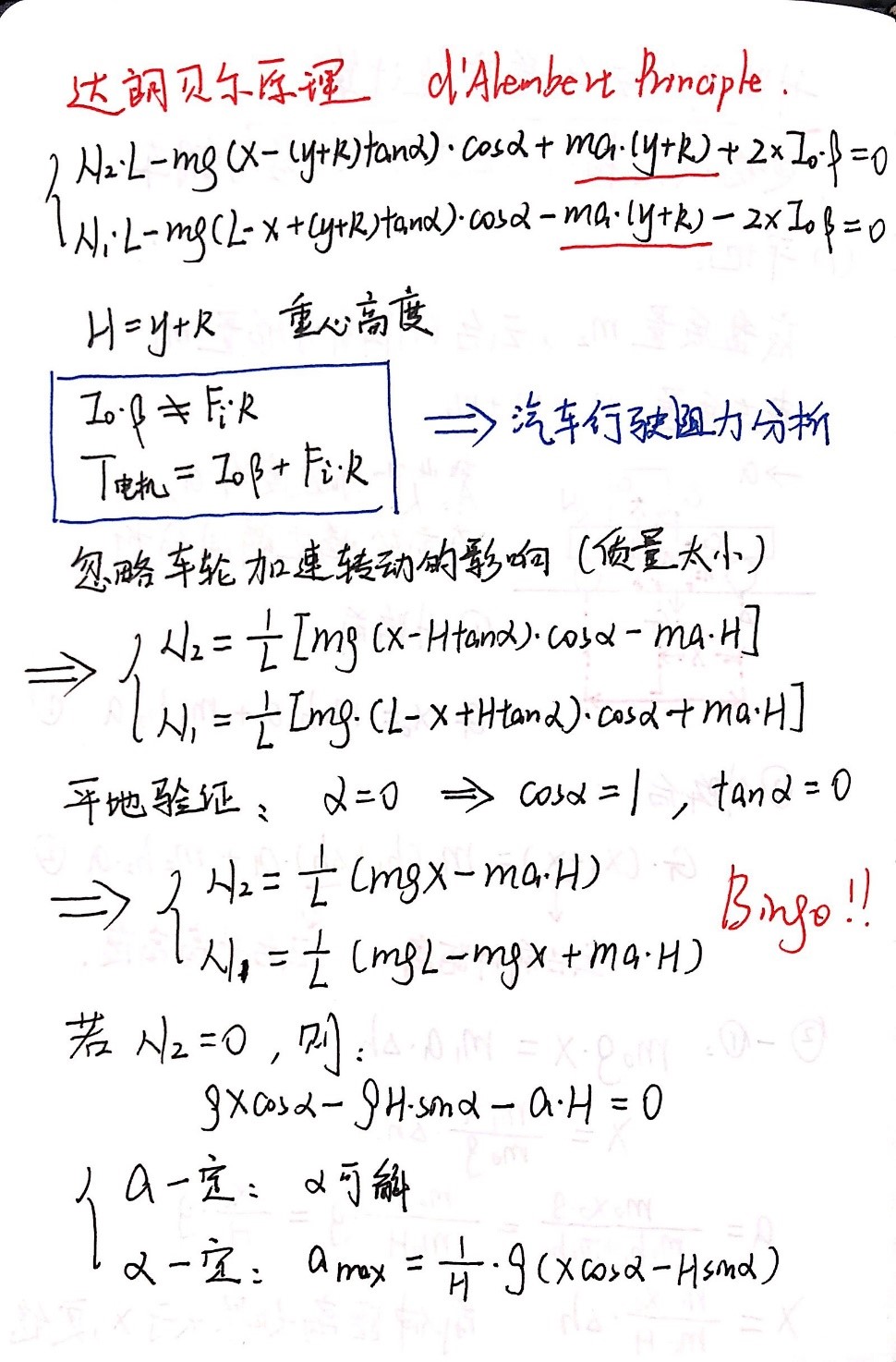
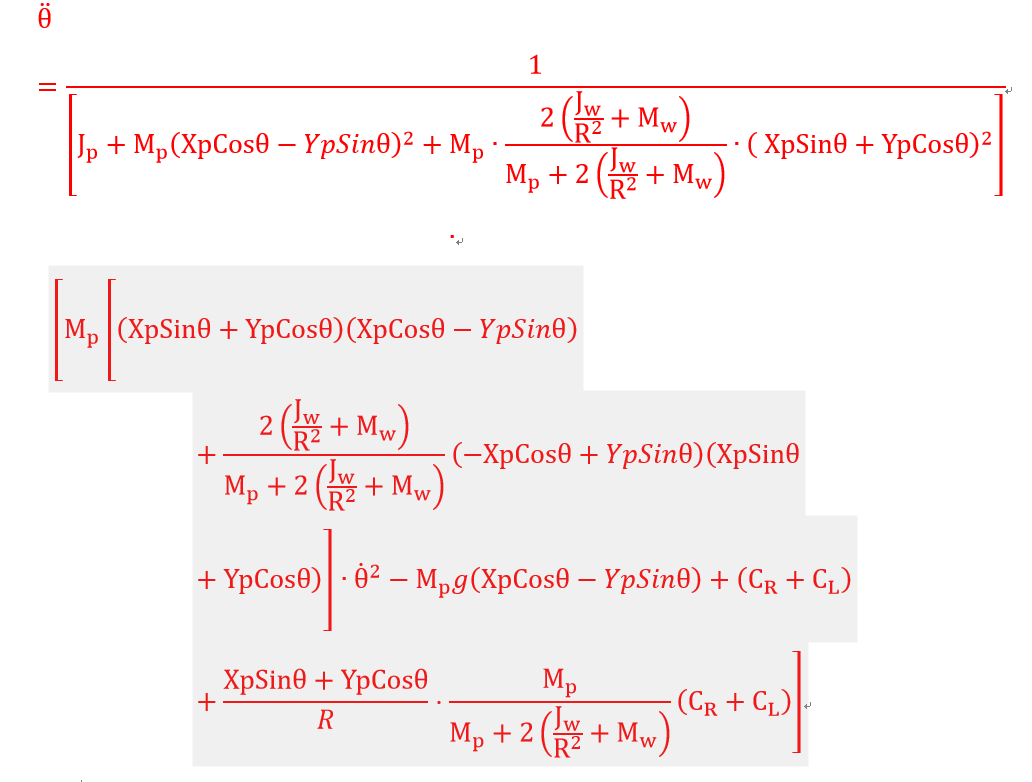
经过上面几个式子推导可以得到以下这个限制公式:
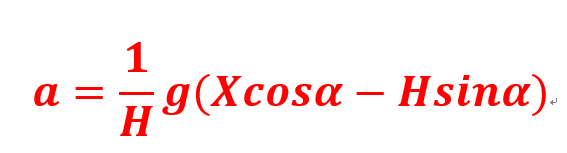
其中
a为车体加速度,
H为重心高度
g为重力加速度
X为重心距离后轮的水平位移,可以认为与车轴距相关
a为车体角度
从这个限制公式可以看出,重心高度越高,加速度越大,坡度越大,机器人越容易翻车。
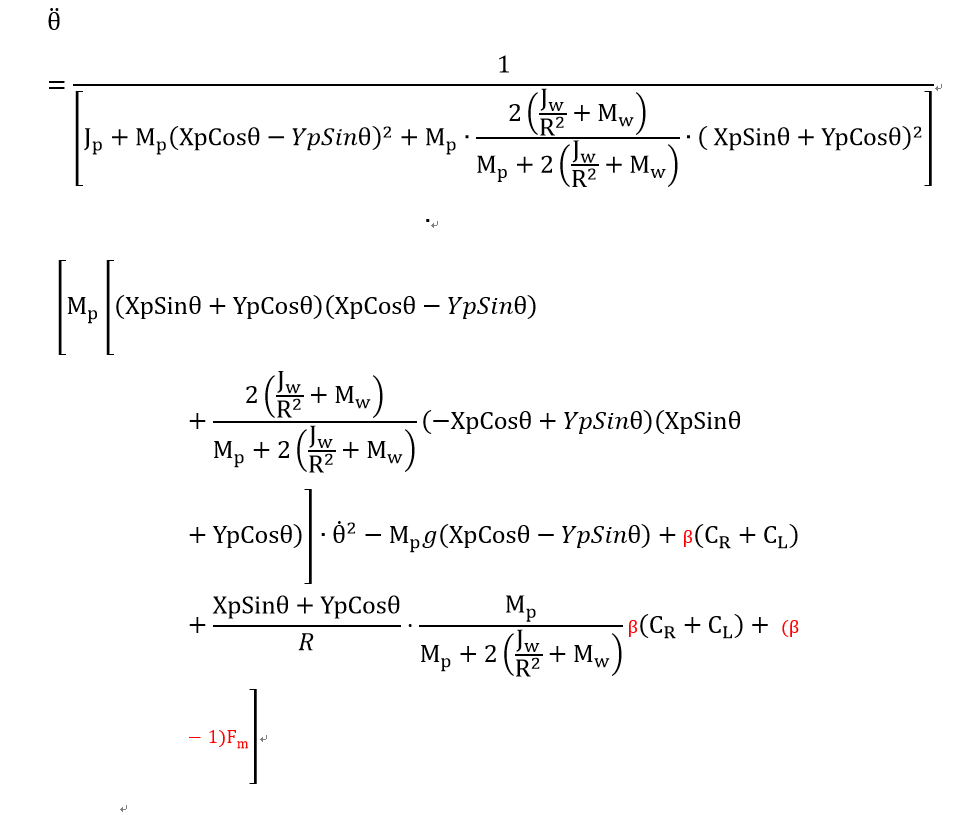
2.两轮着地的受力分析
由于机器人在赛场运行存在由于刹车,碰撞等其他因素造成的加速度变化巨大,不可能完全实时保证加速度一直低于某个值,同时机器人存在已经抬起后轮的情况,这个时候以分析四轮着地的情况得出的结论不完全符合机器人运行分析,故而以后轮抬起而前轮两轮着地形成类似于两轮平衡车的结构进行分析。
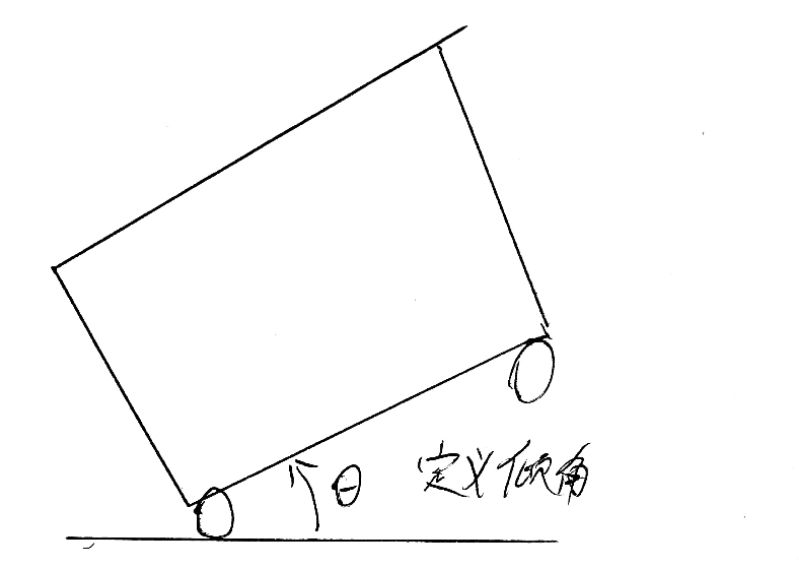
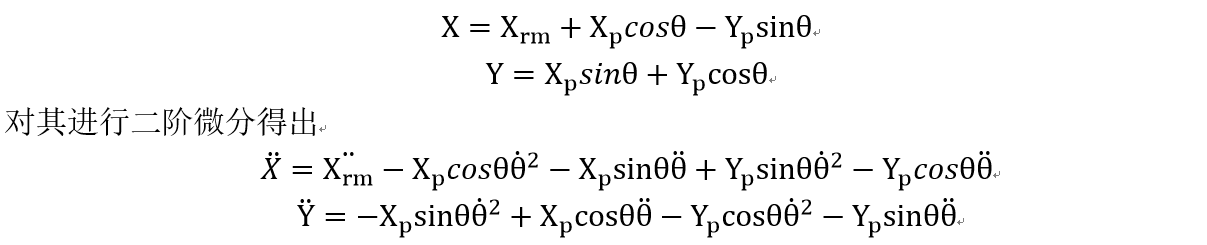
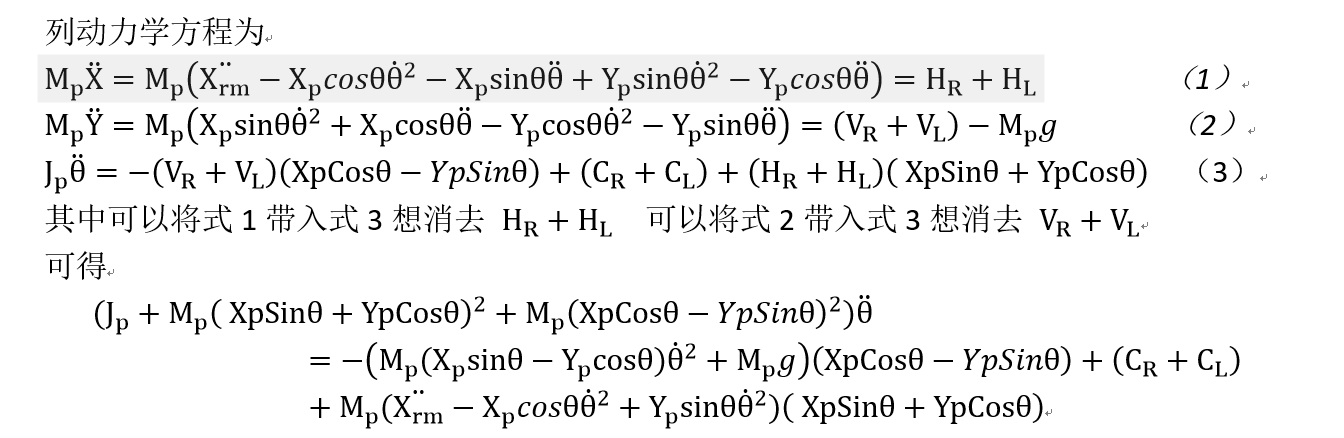
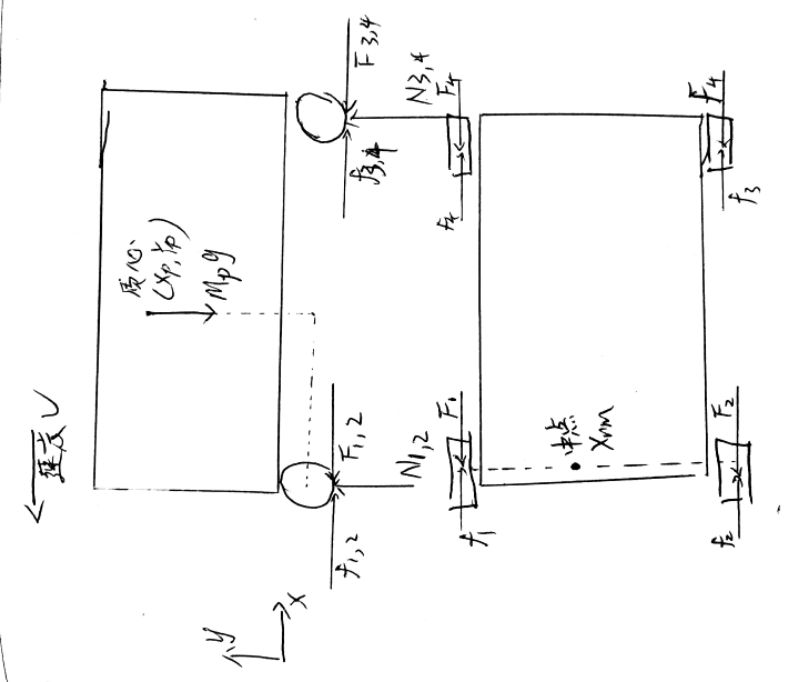
在本小节受力分析下,车体运动描述如下图所示。沿水平向右为x轴正方向,竖直向上为y轴正方向,绕前轮轴线逆时针为倾角正方向,机器人向左以速度v向左运动,在某个时刻进行急刹车,形成向前翻趋势。
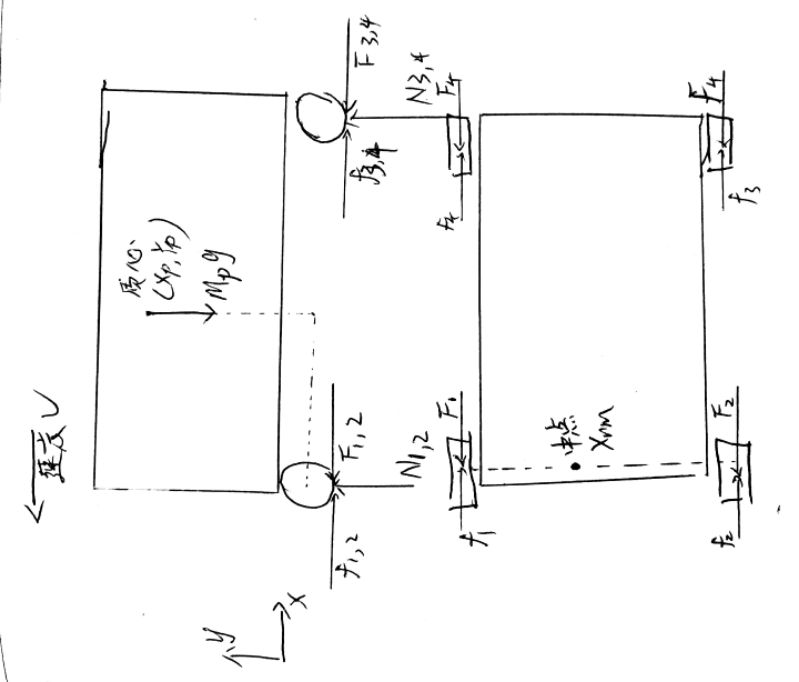
车体向左运动,车体受到四个轮子的支持力N1、N2、N3、N4和牵引力F1、F2、F3、F4以及阻力f1,f2,f3,f4,定义后轮轴中点为Xrm。
当车体有前倾趋势,即车体后轮支撑力N3,N4为零,这个时候牵引力F3,F4也为零。
前轮分左右轮,给车体提供向上支持力Vr,Vl以及向前的推力Hr,Hl,以及电机力矩 Cr,Cl。
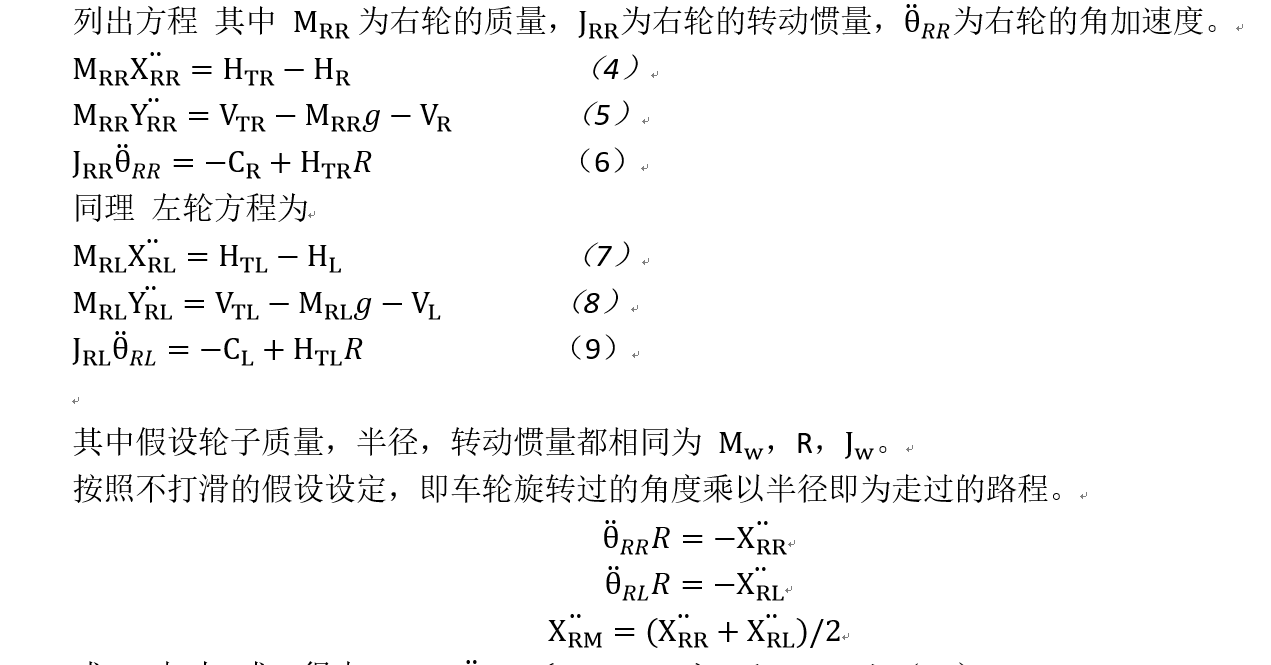
对于抬起的车体和后车轮作为一个整体,进行受力分析,如图所示。

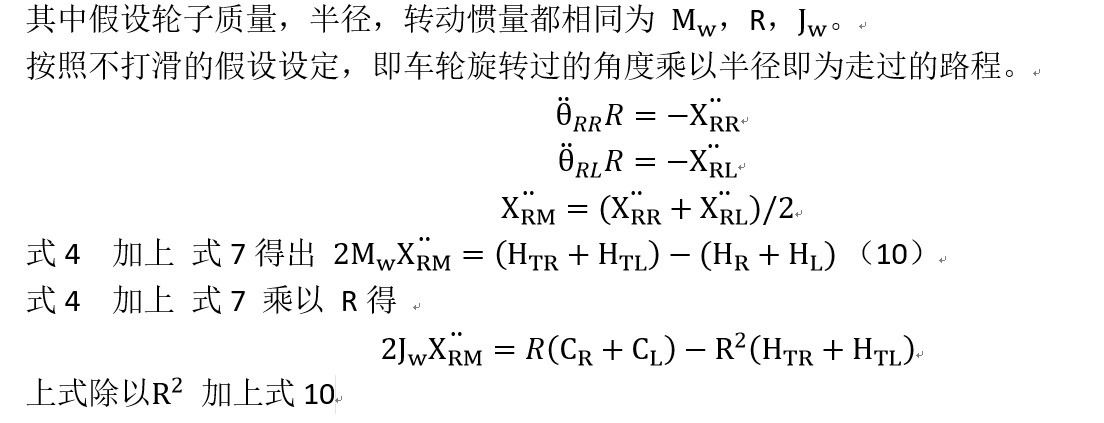
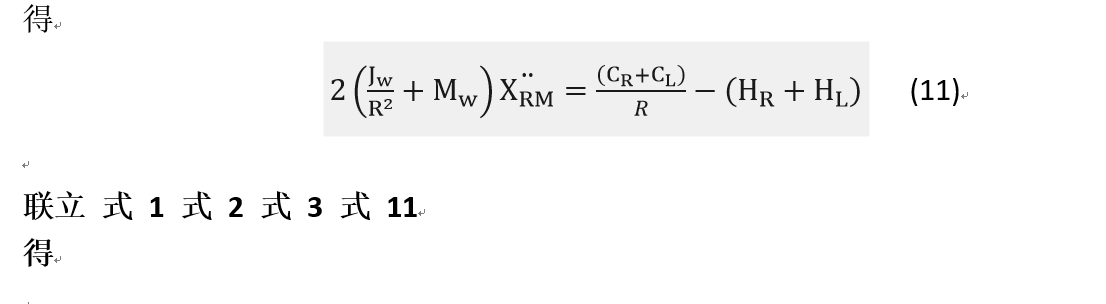
对于车轮进行分析,以分析右轮的受力为例,如图所示。

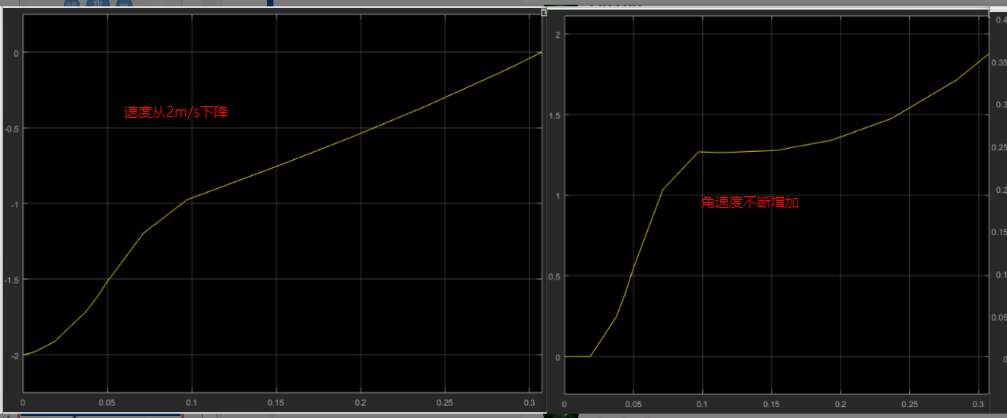
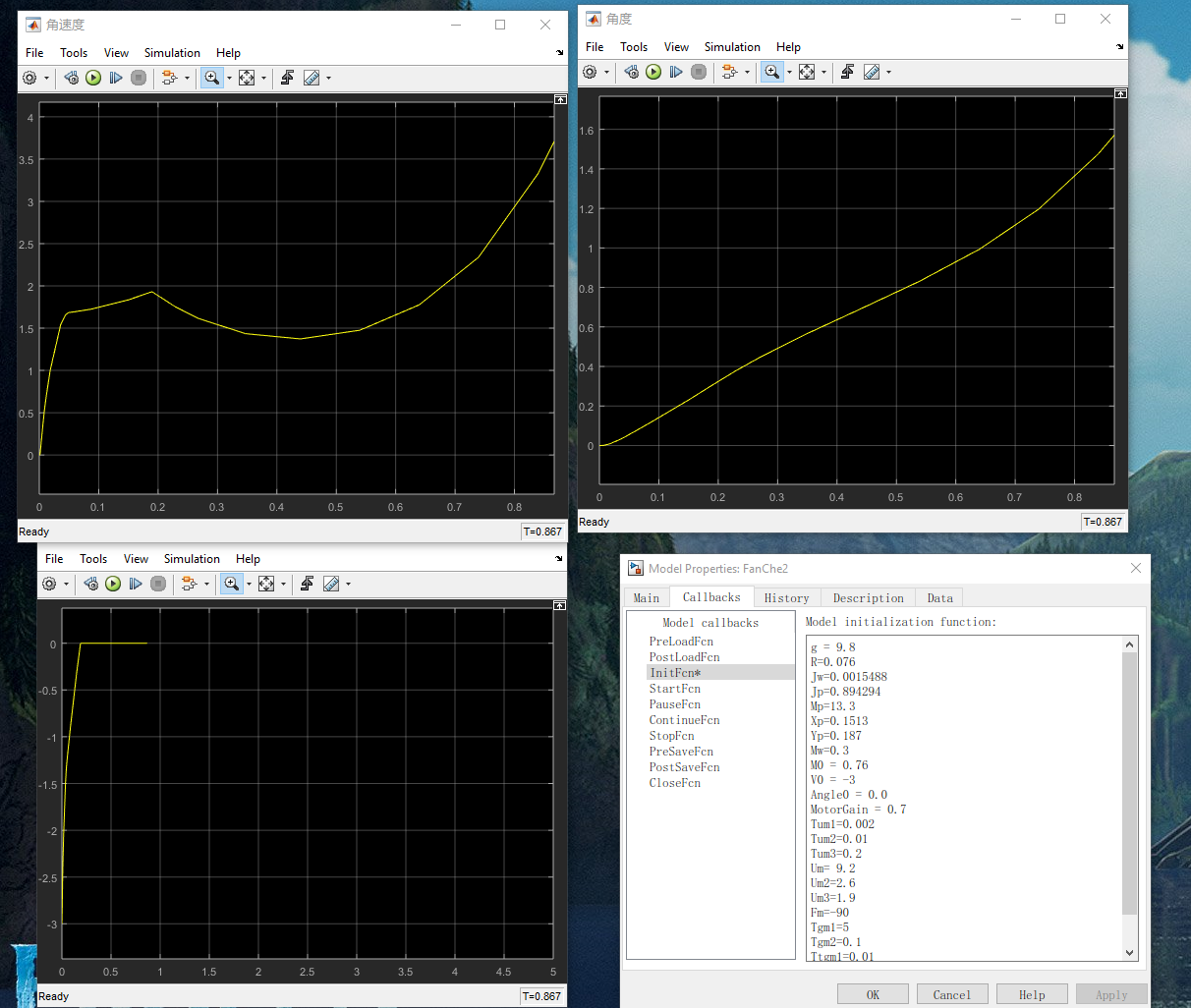
通过实验进行简单验证,实验图如图所示,通过采集陀螺仪数据发送到上位机,翻车抬起的前期是角速度增加,车体速度减少的过程,这段时间角度也有一定的抬高,用线性积分这段时间的角速度得到角度,之后由于速度已经停下了,角速度开始下降,这段时间符合两轮着地,把角速度和积分的角度带入模型中,得到仿真图所示。
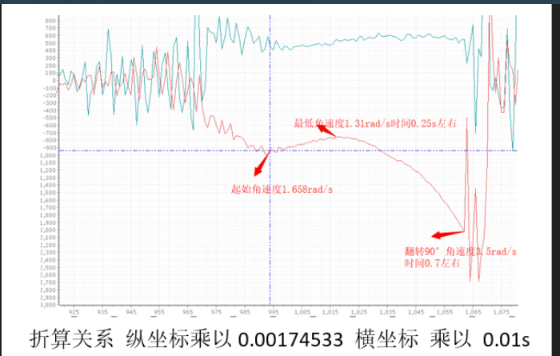
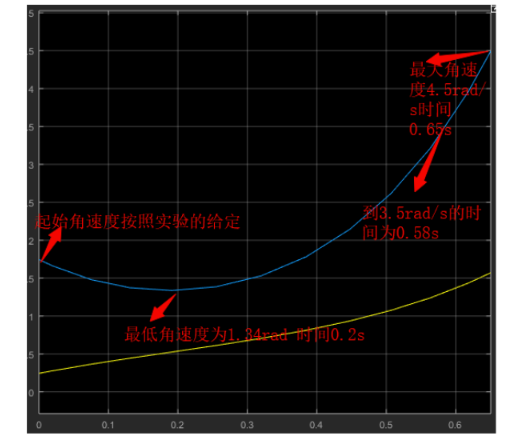
可以看出模型对翻车过程后半部分的拟合程度较好,这一部分是由于车体已经具有一定的角速度,在角速度的旋转能量转化为重心抬高的重力势能这个过程,但对翻车前一部分的解释不足,翻车是怎么样抬起前轮,机器人的前进动能又是如何转化成旋转的动能呢。
3.打滑假设
在上述几个公式中,均有不打滑假设,但机器人在翻车过程中,肯定有打滑,那么对打滑做出简单模拟,假设
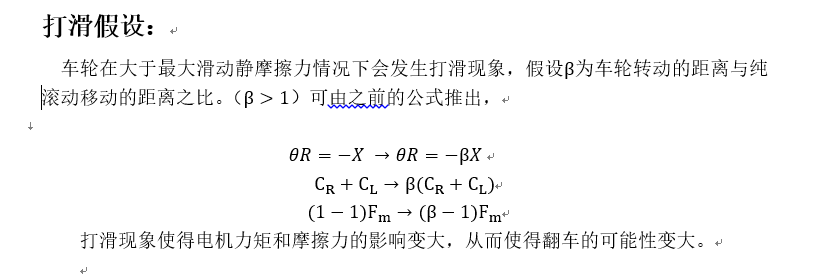
其中,Fm为机器人受到地面的摩擦力,这里我们可以看出打滑使得 地面摩擦力和电机力矩的影响变大,
地面摩擦力可以使用简单的方法测量,例如把机器人放在一个斜坡上保持平衡,测量到 摩擦因数,用摩擦因数简单估计摩擦力可以得到在角度约30度保持平衡。在此基础重新仿真得到,
可以看出来在调整打滑率去拟合实验数据,可以得到较为合适的曲线。
为了探究打滑率,做了一个机器人如下图所示。顶部有黄铜,可以用来调整重心高度,同时麦轮上有橡胶来简化麦轮受力分析。
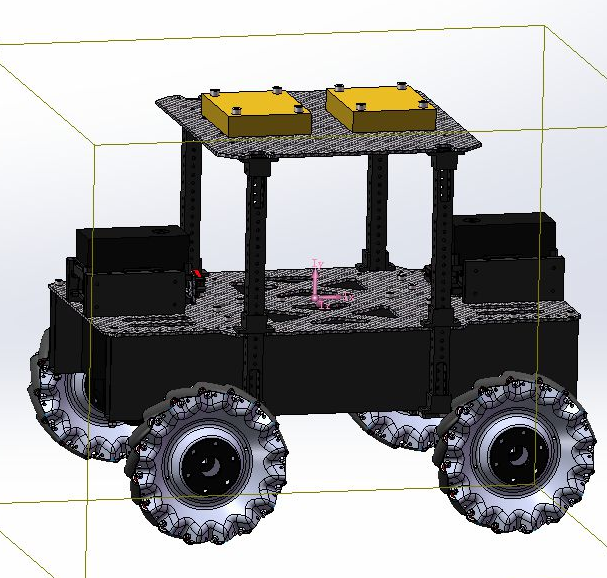
实验可以得到从机器人回传的角速度,速度,加速度,电机力矩等信息,通过采集实验数据,在模型中调整打滑率来拟合实验数据。模型图如图所示,调整的仿真图如图所示。
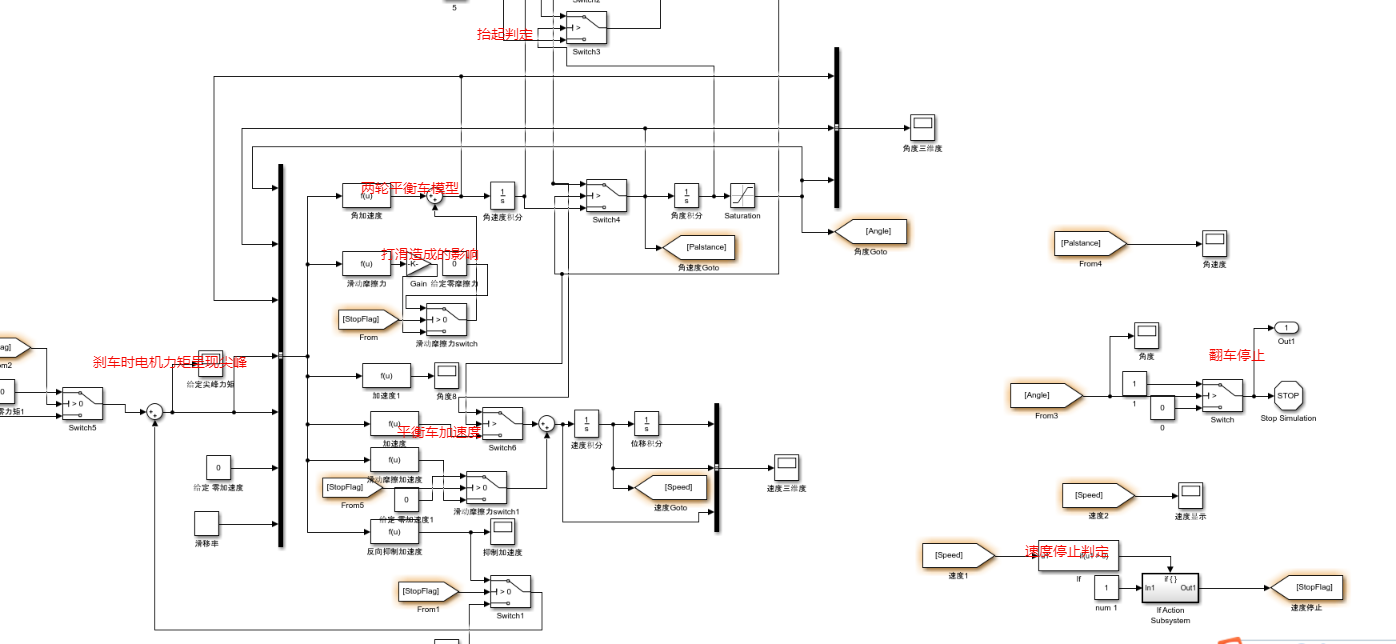
如上图所示,通过这几个部分简单介绍翻车过程的机理,在此基础上,我们可以对我们的机器人结构重心,控制策略优化进行改变。
请问这篇文章对你有用吗?
【分享帖】如何优雅地翻车