【分享帖】云台系统辨识及matlab调参控制
4856
0
13
2019-10-16
https://bbs.robomaster.com/thread-5059-1-1.html
去年参考了官方的开源教程之后,一直想试试用理论指导实践的方法来控制我们的云台,不过试了几次发现还不如手调。
今年又重新捡起这个项目,一通调试之后终于有了一些成果,想和大家讨论一下。
具体步骤就是按照教程中的一步一步来,我们基本上省去了模型验证,就拿自己辨识出来的模型用了。
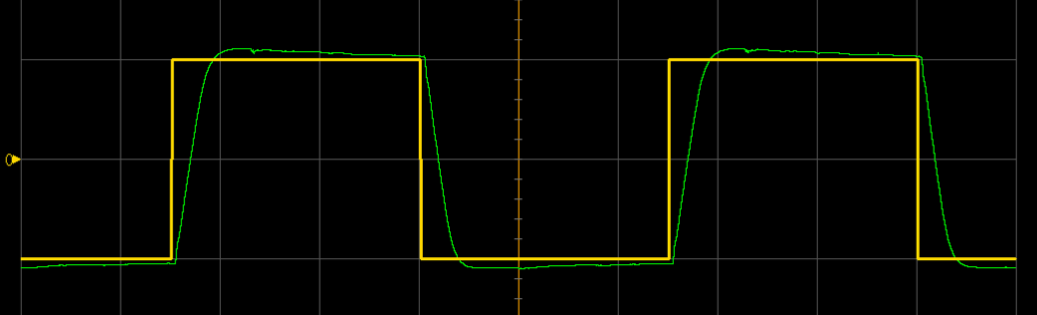
最后效果是这样的
这是速度环内环,可以看到效果还是不错的,这我以前用pid调不出这个效果,上升时间是0.1秒,没有超调,稳态不差也不大,基本是一个好的内环,在这个基础上再调外环,就变得很方便了,几分钟就调好了外环。
在这个过程中,遇到了很多问题,总结如下:
1.教程中最后设置的校正器为是三阶的,但是实际用起来,三阶校正器有很多问题,类似于它的D参数很大,容易产生超调,和启动慢的问题。最后我用的两阶的校正器。
2.教程中没有说校正器的限幅问题,事实上是需要限幅的,具体方法就限制校正器的输出大小。
3.系统闭环控制,进行系统辨识,再算出开环传递函数是比较好的做法
欢迎大家讨论,因为现在论坛上说这个事的比较少,我又比较感兴趣,就发个讨论贴吧
去年参考了官方的开源教程之后,一直想试试用理论指导实践的方法来控制我们的云台,不过试了几次发现还不如手调。
今年又重新捡起这个项目,一通调试之后终于有了一些成果,想和大家讨论一下。
具体步骤就是按照教程中的一步一步来,我们基本上省去了模型验证,就拿自己辨识出来的模型用了。
最后效果是这样的
这是速度环内环,可以看到效果还是不错的,这我以前用pid调不出这个效果,上升时间是0.1秒,没有超调,稳态不差也不大,基本是一个好的内环,在这个基础上再调外环,就变得很方便了,几分钟就调好了外环。
在这个过程中,遇到了很多问题,总结如下:
1.教程中最后设置的校正器为是三阶的,但是实际用起来,三阶校正器有很多问题,类似于它的D参数很大,容易产生超调,和启动慢的问题。最后我用的两阶的校正器。
2.教程中没有说校正器的限幅问题,事实上是需要限幅的,具体方法就限制校正器的输出大小。
3.系统闭环控制,进行系统辨识,再算出开环传递函数是比较好的做法
欢迎大家讨论,因为现在论坛上说这个事的比较少,我又比较感兴趣,就发个讨论贴吧
文章标签
请问这篇文章对你有用吗?
【分享帖】云台系统辨识及matlab调参控制