【RM2023-6R工程机器人机械结构开源】浙江大学-Hello World
本开源包括三维模型、零件二维图纸、效果演示视频和说明文档
链接:https://pan.baidu.com/s/1CB2FHIWt76gsHsACgKs7eQ?pwd=oosd
提取码:oosd
【三维】
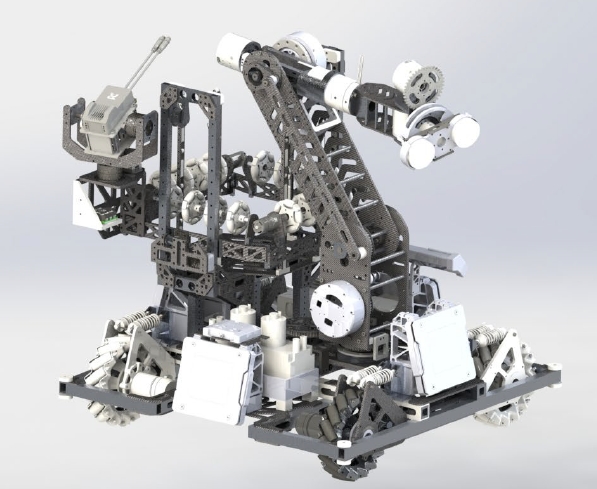
内含总装配体的step文件(包括一个装甲板遮挡范围和一个地面),包含完整的设计树。
若打开后零件名为乱码,请打开solidworks选项社指,找到“系统选项”中的“导入”,将启用3DInterconnect的勾选去掉。
【二维】
内含部分零件的二维图纸
【效果演示】
内含取矿演示视频和兑换演示视频
【说明文档】
含有 开源报告_2023浙江大学六轴工程机器人机械结构说明文档.pdf”,介绍了该工程机器人机械结构与研发总结。
声明:
1、本次项目开源分享项目出自 浙江大学 Hello World 战队,作品仅用于技术交流,未经作者允许,不得作任何商业用途。
2、本次项目开源的文件的最终解释权归浙江大学 Hello World 战队 所有。
3、本次项目开源旨在推动RM各队伍共同进步,欢迎各队伍与 Hello World 战队相互交流学习。
前言:
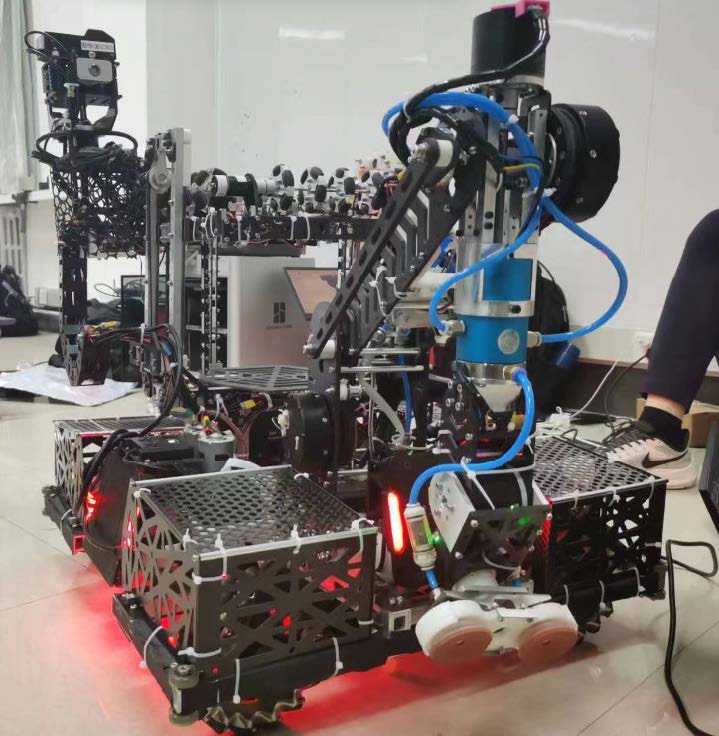
尽管存在节省体积和质量、一即是全的优点,全r轴的机械臂工程机器人在当前规则背景下其实并不具有明显的优势。但秉着尽早作出技术积累以备不时之需的观念,除了平移轴与旋转轴结合的工程机器人,本赛季中还额外分派了少量的人手对全r轴机械臂工程机器人进行研发工作。由于精力有限,除机械臂以外的结构尽可能选择或者迁移已经存在的稳定可靠且实用性强的结构设计方案。很遗憾的是,尽管该机器人在分区赛前已经有了相当高的完成度,但还足以在区域赛中登场。而在后续的国赛备赛期间,本人由于人手原因补充到了实际上场的工程机器人的相关工作中,因此六轴工程机器人之后未能得到进一步的优化。在赛场中我也见到许多队伍将全r机械臂实际落地到比赛里,留下了令人深刻的印象。为了弥补遗憾,也为了产生更多的样本与交流,在此开源这款不那么出彩的工程机器人。赶制较为仓促,如有错误之处还请谅解和指正。
致谢:
感谢西安交通大学笃行、南京理工大学Alliance、广东工业大学DynamicX等在机器人结构设计过程中提供直接或间接帮助的所有比赛队伍。
链接:https://pan.baidu.com/s/1CB2FHIWt76gsHsACgKs7eQ?pwd=oosd
提取码:oosd
【三维】
内含总装配体的step文件(包括一个装甲板遮挡范围和一个地面),包含完整的设计树。
若打开后零件名为乱码,请打开solidworks选项社指,找到“系统选项”中的“导入”,将启用3DInterconnect的勾选去掉。
【二维】
内含部分零件的二维图纸
【效果演示】
内含取矿演示视频和兑换演示视频
【说明文档】
含有 开源报告_2023浙江大学六轴工程机器人机械结构说明文档.pdf”,介绍了该工程机器人机械结构与研发总结。
声明:
1、本次项目开源分享项目出自 浙江大学 Hello World 战队,作品仅用于技术交流,未经作者允许,不得作任何商业用途。
2、本次项目开源的文件的最终解释权归浙江大学 Hello World 战队 所有。
3、本次项目开源旨在推动RM各队伍共同进步,欢迎各队伍与 Hello World 战队相互交流学习。
前言:
尽管存在节省体积和质量、一即是全的优点,全r轴的机械臂工程机器人在当前规则背景下其实并不具有明显的优势。但秉着尽早作出技术积累以备不时之需的观念,除了平移轴与旋转轴结合的工程机器人,本赛季中还额外分派了少量的人手对全r轴机械臂工程机器人进行研发工作。由于精力有限,除机械臂以外的结构尽可能选择或者迁移已经存在的稳定可靠且实用性强的结构设计方案。很遗憾的是,尽管该机器人在分区赛前已经有了相当高的完成度,但还足以在区域赛中登场。而在后续的国赛备赛期间,本人由于人手原因补充到了实际上场的工程机器人的相关工作中,因此六轴工程机器人之后未能得到进一步的优化。在赛场中我也见到许多队伍将全r机械臂实际落地到比赛里,留下了令人深刻的印象。为了弥补遗憾,也为了产生更多的样本与交流,在此开源这款不那么出彩的工程机器人。赶制较为仓促,如有错误之处还请谅解和指正。
致谢:
感谢西安交通大学笃行、南京理工大学Alliance、广东工业大学DynamicX等在机器人结构设计过程中提供直接或间接帮助的所有比赛队伍。
关联专栏
 机械开源专栏
机械开源专栏请问这篇文章对你有用吗?
【RM2023-6R工程机器人机械结构开源】浙江大学-Hello World