「2019-7」【每周分享】一文带你揭开电机的世界。

众所周知,在生活和生产中,机器人能模仿人类的行为。比如巨型的机械臂机器人可以组装汽车;扫地机器人可以依靠轮式底盘移动,通过转动小扫把来清洁地面。
大家对机器人的这些行为已经司空见惯。要让机器人动起来,就需要有动力源驱动它,常见的机器人驱动方式有液压、气动和电动三种。
液压驱动常用于大负载的情形,气压驱动常用于负载小、精度要求低的场景。相比之下,电机的驱动就比较简单、稳定性好,应用也最为广泛,比如机械臂的关节、家用电器的驱动。
之前,萝卜君用视频简单讲解了电机的工作原理,传送门:《电机接上电就能动?超通俗讲解有刷、无刷电机的驱动原理》。今天我们再深入聊聊电机。
在机器人的设计过程中,电机是一个极其重要的驱动单元,就好比人类的肌肉和关节。电机将电能转化为机械能,为机器人的运动产生驱动转矩(让机器人动起来),被广泛应用在机器人的关节驱动、轮式底盘驱动等方面。
电机有两种供电方式,直流和交流。直流电机可以用锂离子电池之类的直流电源供电,所以在机器人领域被广泛应用。
根据是否带有电刷换向器,又可以将直流电机分为有刷电机和无刷电机。
直流有刷电机
直流有刷电机的结构比较简单,通过换向器进行换向。下图中,电流从红色开关流入,经过黄色的转子线圈,从灰色开关流出。通电线圈在磁场中受安培力,开始旋转。
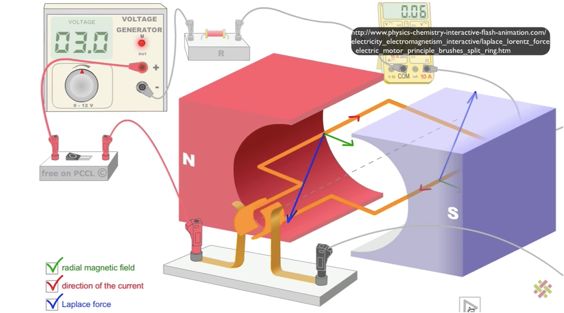
当转到平衡位置时,换向器就会和电源失去连接,但没关系,转子会靠惯性继续转动,转过平衡位置。这时,换向器和电刷的结构会使电流方向发生逆转,线圈产生的磁场方向也随之改变,即完成了一次机械换向的过程。
但由于电刷和换向器长期互相摩擦,导致机械磨损,因此有刷电机噪音大、寿命短、需要定期维护。而无刷电机的出现恰好解决了这个问题。
直流无刷电机
直流无刷电机的结构稍复杂一些,它不利用机械换向,而是用电子换相。下图是无刷电机的定子绕组图(中间的转子结构没有画出)。

图中的黄色部分是三个线圈绕组,代表三个相,它们的一端在中心相连,另一端分别引出“A”、“B”、“C”三个端子。
如果对三个端子两两通电,那就有 6 种通电情况:A 正 B 负、A 正 C 负、B 正 A 负、B 正 C 负、C 正 A 负、C 正 B 负。
不管什么组合,每一时刻都有两个线圈有电,然后产生磁场。

如果再按照一定的次序通电,就产生了下图的磁场:

红箭头表示每个线圈产生的磁场,黄箭头表示两个线圈合成的磁场。可以看出,无刷电机是定子绕组产生了旋转的磁场。
那么,转子又在干嘛呢?转子是永磁体,因为异性相吸同性相斥的原理,转子会被定子产生的磁场带动,跟随定子磁场的脚步一起转起来。

而每当转子要与定子对齐的时候,我们就换一次相,转子就永远都追不上定子了。想想也是一个伤感的故事。
我们把转子的结构加上,看几个典型的例子:
下图从左往右分别是,三相三绕组一极对、三相六绕组二极对、三相六绕组四极对内转子电机,绕组数就是它的定子中线圈绕组的数量,极对数就是内转子的极对数量。

不仅有“转子在内部”的无刷电机,还有“转子在外部”的无刷电机。虽然转子位置不同,但基本原理是一致的:

它的转子在电机外壳上,电机转动时,内部的线圈绕组不动,外壳和转子转动。因为一般外壳的质量比较大,所以转子的转速较低,电机扭力输出大,航模用得比较多。
电机驱动器
要给它们两两交替着通电,不可能用双手疯狂地换着插电,就算你的手速跟得上电机转速让它顺畅地转起来,你也没法控制转速。这时,就需要用到电机驱动器,也称电子调速器(Electronic Speed Control,ESC),简称电调。

萝卜君视频版的电调讲解,可以帮助理解这部分内容:《电机是如何调速的?今天我把它整个都拆开,总算整明白了》
顾名思义,电机驱动器就是驱动电机的,它通过控制 A、B、C 三端的输入,让电机转起来,并且控制电机的转速和方向。

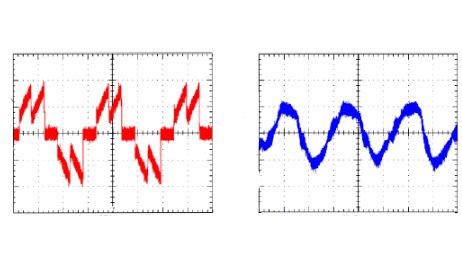
无刷电机的转子在匀速转动时,各定子绕组会产生反电动势,电机结构不同,产生的反电动势波形也会不同,有方波反电动势和正弦波反电动势。
方波的通常采用方波电流驱动,正弦波的通常采用正弦波电流驱动。

方波驱动
无刷电机有 A、B、C 三相输入端口,所以电调有三个输出端,一个端有两个开关,一共是六个开关,这也叫全桥驱动电路:
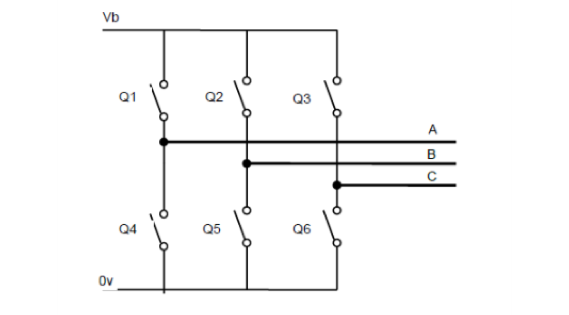
每次按照一定的次序同时闭合两个开关,就可以保证 A、B、C 每次都有两个端口连接电源的正负极:

利用开关器件来控制电机和电源的连接,就是驱动的原理。(如何控制开关,这属于电控知识,在这不展开说。)
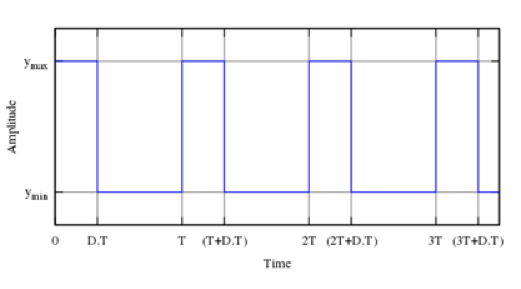
那如何调速呢?我们引入脉冲宽度调制(PulseWidth Modulation,PWM),PWM通过调制一列方波的脉冲宽度,来改变输出到电机的平均电压,而平均电压一变化,速度就变化了。
电机的驱动和调速原理就到此为止了?

方波驱动的定子线圈绕组中的电流是瞬间变化的,产生的磁场力合力的方向也是瞬间偏移 60°,所以转子并不是平稳地转过每一个 360°,而是像时钟一样,一格一格地走,这就形成了转矩脉动。
如何抑制转矩脉动?我们还有第二种驱动方式——正弦波驱动。
正弦波驱动
利用正弦波电流驱动可以有效降低转矩脉动的现象。但正弦波驱动也有缺点,就是控制过程较复杂,且成本较高。想用正弦波电流来驱动电机,就要求反电动势是正弦波。
正弦波驱动电机的方式也是全桥电路,但它的调速方式和方波驱动不同。
常见的正弦波控制方法有电压正弦波控制(sinusoidalpulse width modulation,简称 spwm)、磁场定向控制(field-oriented control,简称 foc,也称矢量控制,vector control)和直接转矩控制(direct torquecontrol,简称 dtc)。
foc 方式被广泛应用,接下来我们主要介绍 foc 的控制思想。
要理解 foc 的控制思想,我们得再复习一下直流有刷电机。直流有刷电机能转起来是因为磁场和电流互相作用产生了力(转矩),转矩的大小由磁场和电流决定,而定子(永磁体)产生的磁场是固定的。所以只要控制电流就可以控制转矩量,速度也就能控制了。
而无刷电机的设计强行增加了游戏难度。它的电流不仅产生了转矩(称作转矩电流),还磁化了定子中的磁通材料并产生磁场(称作励磁电流)。这两个量耦合在一起,使得整个控制系统非线性、高阶、又具有强耦合性(也就是很难控制的意思)。
所以,要想控制速度,我们必须将转矩电流和励磁电流彼此分离,单独控制。foc 利用了坐标旋转变换的方式,分解了定子三相电流。将电流分解后,就可以得到励磁电流分量和转矩电流分量,分别控制这两个量,就可以控制转矩了。转矩大了,力大了,速度就上去了。
foc 方式的转矩脉动极小,所以转动非常平稳,也降低了噪声。好东西当然也有缺点,就是算法复杂,成本高昂。坐标旋转变换中涉及clarke 变换和 Park 变换,各种高频率的数学变换对微处理器的要求很高。
转子位置的检测
终于终于,速度能控制了,但这时候的电机就像一个蒙着眼睛跑步的人,知道自己跑快或跑慢,但假设要精确到 3 米/秒,还是做不到。
这时,我们就需要一个教练在旁边看着,看到他跑了 2 米/秒,就让他再跑快一点。而在电机里,我们只要检测转子的位置,就能清楚地得知电机的转速,进而控制它跑快点还是跑慢点(这也叫速度闭环)。
而且,转子的位置直接影响电子换相,电调就是通过读取转子的位置来决定什么时候换相的。
如何检测转子位置呢?根据电调是否有传感器,分为有感检测和无感检测。有感检测相对简单,利用编码器、霍尔传感器等传感器就可以检测转子的位置。

无感检测不需要在电机内部添加传感器,成本低、应用广,常用的有反电动势法。
反电动势法
转子转动过程中,旋转的转子会在定子上产生反电动势,我们通过这个反电动势的变化情况,也可以判断转子的位置。
foc 对转子位置精度要求比较高,所以无感 foc 驱动设计也是一个难点。传统方法有高频信号注入法、滑模变结构控制方法、模型参考自适应方法等。随着人工智能的发展,神经网络、模糊控制、专家系统等智能算法也被用来检测转子的位置。智能算法的自适应能力强、鲁棒性好,但目前依然处于研究阶段。
总结和应用
最后,我们做一个小总结:无刷电机没有电刷换向器结构,不需要定期维护,寿命较长。在驱动原理上,无刷电机的驱动又分为方波驱动和正弦波驱动,前者原理简单、成本较低,后者算法较复杂,但可以有效地抑制转矩脉动,使电机转动更平稳。
在实际的应用中,我们可以根据实际需求,综合考虑各方面因素,去选择合适的电机方案和驱动方案。
直流有刷电机成本较低,机械磨损大,可以用作机器人的轮式底盘结构;无刷电机的一大优点是换向的时候不会产生电火花,所以广泛用于特种机器人上。
正弦波驱动的电机转矩脉动小,可以应用在控制精度要求高的地方,如机器人的关节驱动;方波驱动的电机控制较简单,但相比正弦波驱动存在着转矩脉动大、噪音大的缺点,可以应用在空中机器人的多旋翼动力系统。

想深入了解电机和电调的小伙伴可以阅读书籍:《无刷直流电机控制系统》;作者:夏长亮;科学出版社
电子科技大学 小泽
RoboMaster2017校机器人队电控组
一个闷骚佛系、朋克养生的逗比疯子

本文来自 RoboMaster 技术智囊团小泽,文章部分有修改。如果你也希望加入技术智囊团,请通过 robomaster@dji.com 联系我们。文章部分素材来自公共网络,侵权删除。


请问这篇文章对你有用吗?
「2019-7」【每周分享】一文带你揭开电机的世界。