「2019-11」【每周分享】陀螺仪:少了我你连直线都走不了!

我们看到一些先进的机器人,走在路上非常稳,不仅在平地上行动不会摔跤,走在坑洼里也可以极好地保持平衡。

却有另一些机器人走路歪歪扭扭,在平地上都可以把自己摔一跤,因为它不知道自身的平衡状态,一步歪,步步歪。

再看 RoboMaster 的机器人比赛,虽然机器人都有四个轮子,不容易摔倒,但要随心所欲地实现跑直线、转弯漂移,也需要很好地控制自己的平衡。
因为机器人的控制系统会有误差,所以假设你让轮子转 5圈,可能有一个轮子只转了 4 圈。还有机械安装上的误差,以及轮子磨损造成了不同的摩擦力,会导致机器人越跑越歪。
在 PID 科普的文章中,我们学过反馈控制:《什么是机器人比赛中的PID控制?》。反馈控制的好处就是,假设有传感器去测量实际数据,那我们就有办法消除误差,让实际数据稳定在期望的数据上。
所以我们要让机器人只有察觉到误差,及时消除误差,才能随心所欲地奔跑。那如何发现误差呢?
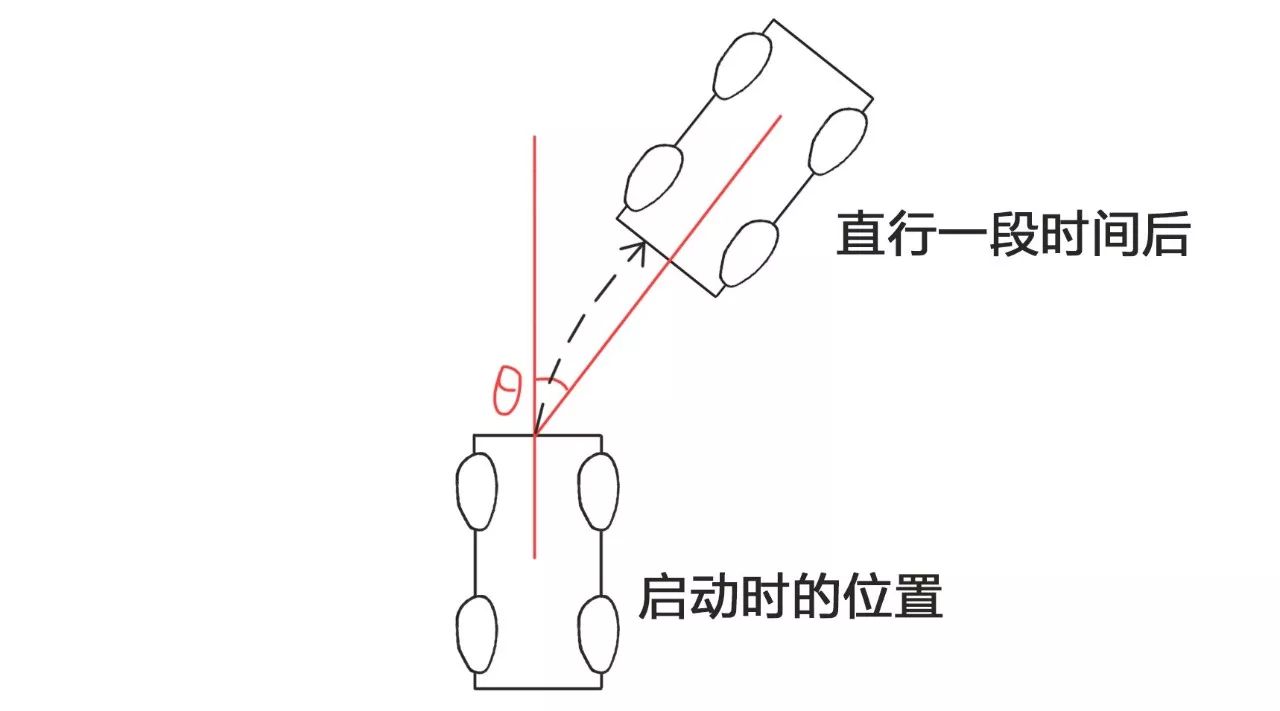
假设我们的目标是让机器人走出一条直线。机器人走得歪歪扭扭,是因为各种扰动使它发生了绕着垂直于地面方向的旋转,也就是头的方向左右摆动。因此,我们要寻找一种传感器来测量机器人垂直于地面方向的旋转量,然后消除这个旋转。
寻找适合的传感器
一般来说,找寻传感器会从物理的原理上找。高中物理分为力、热、声、光、电和磁。我们先看力学,物体在自旋时会有一个向心力 F,向心力的公式为:

可以看到,虽然 F 和 ω(角速度)相关,似乎可以通过 F 求得 ω,但 F 也和 r(旋转的半径)相关,而这个 r 我们无法测量,所以向心力这个思路不行。
除了向心力,还有另一种力叫做科里奥利力。如果旋转物体中,有质点由于惯性进行了直线运动,相对于旋转物体产生了偏移,这个力就会产生。它的公式为:

v 是内部产生的可测量的震动。科里奥利力与向心力不同,它和旋转的半径没有关系,所以这个思路可行。
现实中就有一种传感器利用这个原理测量角速度,这种传感器叫 MEMS 陀螺仪(微机械陀螺仪)。MEMS 陀螺仪测得角速度后,我们将角速度进行积分,就可以得到相对角度(参考系为自身的某一状态,比如和刚启动时的状态),最后再用 PID 修正角度,达到直行的效果。

我们都知道,凡是测量都总是会有误差,靠积分获得的角度在一定时间内虽然是可靠的,而积分将误差同样累计,在一段时间后这个角度也会越来越不准,这个时间的长短基本正相关于器件的价格。

利用类似原理的还有机械式陀螺仪和光纤陀螺仪。机械式陀螺仪是唯一一个真的有个陀螺在转的传感器。而在光学中,一般是基于萨格纳克(Sagnac)效应的陀螺。

实际上,这几种传感器更准确的叫法应该是:角速度传感器。但由于各种原因,现在一般都叫陀螺仪。结合成本和测量方法,我们一般选用 MEMS 陀螺仪。

获取旋转角度
我们以 ADI(亚德诺半导体)公司的 ADIS16470 陀螺仪为例,讲解陀螺仪如何获取角度。
刚刚说过,陀螺仪可以测出角速度,把角速度进行积分,就可以获得角度。如果想获得实时的角度,就要知道每次测量的时间间隔,利用时间和角速度再积分,就可以得到实时的角度了。
获得时间间隔的方法有两种:
1、装一个计时器:计时器计算时间间隔,再告知陀螺仪。但这样会有时间延迟。

2、陀螺仪自己计时:ADIS16470陀螺仪有计时功能,自己给自己汇报时间,不会有延迟误差。
陀螺仪的误差
刚刚也说过,测量总会有误差,陀螺仪的误差产生来自于各种外力干扰和温度变化。误差会导致用陀螺仪修正过的机器人也在左右摆动,走不出平滑的线,或者静止时会慢慢地自旋。我们把这种现象叫做漂移。
这点误差对于地面机器人的影响可能不大,但是对于无人机或者其他精度要求超高的机器人来说,稍微有点偏差都很致命。
如何消除误差
温度因素的误差
温度导致的漂移简称温漂,主要原因是内部测量器件会随着温度的变化而变化,一般有两种方法解决:
1、硬件式:在陀螺仪旁边加一个大电阻进行加热,强制陀螺仪达到某一个温度,就可以保持恒温状态;
2、软件式:先测量不同温度下的温漂情况,然后进行拟合和补偿,也就是温漂标定,使陀螺仪在不同的温度下有不同的拟合和补偿。
其他因素的误差
除了测量相对角度,还有传感器可以测量绝对角度(参考系为大地坐标系)。我们可以用绝对角度和相对角度进行互补来矫正角度。
另一种传感器就可以帮助我们,它叫地磁计,相当于电子式的指南针,可以指出地磁场的方向。这种传感器测量的是自己与地磁场的角度,也就是绝对角度。
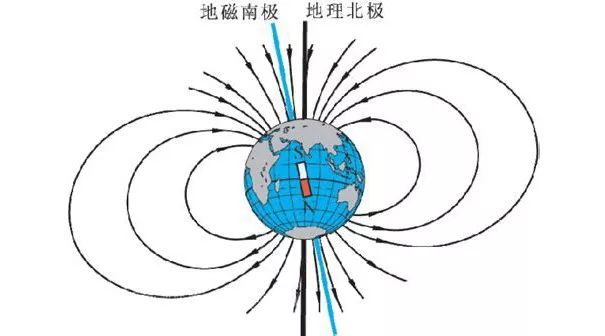
由于磁场环境非常的敏感,电机转动和房屋的钢筋结构都会对磁场造成影响,所以磁场的角度一般是不准的,但是在同一环境内是稳定的。
可以得知,陀螺仪适合短时和动态的,长时间下会有漂移;磁力计适合长时和静态的,动态情况下会有误差。我们各取所长,将两个数据进行融合,并使用比较合适的滤波和算法融合手段,最终得到准确的角度值。这个过程也就是姿态解算。
我们一般用卡尔曼滤波器进行解算。除了卡尔曼滤波算法,还有其他的融合算法,比如一阶的互补滤波、二阶互补滤波和权重参数自适应互补滤波等等。它们的复杂程度不同,我们要根据实际需求选择适合的算法。

对于角度值的求取解算,一个传感器往往是无能为力的,需要多个传感器取长补短。而陀螺仪数据就是最核心的部分,其他传感器基本是为了抑制陀螺仪的漂移而打辅助。
在实际的工程中,测量一个物体的姿态是非常常见的需求,所以很多产品都会把多种传感器比如陀螺仪、加速度计、电子罗盘等等集成到一个模块上,不需要我们一一安装,是不是方便又体贴呀。

通过上述一系列方法,我们获得了一个物体相对于起始位置的角度,就可以利用 PID 反馈控制让机器人随心所欲地奔跑了。
我们还可以把这样一套传感器安装在云台上,将底盘的运动视为扰动。在底盘来回抖动时,云台会以地面为参考系保持静止,我们就可以单独地控制云台。
总而言之,机器人走直线或者像上图一样扭腰,看起来像是一个很简单的事情,但是影响因素有很多,每一步的实现都需要全面考量,只有选择了合适的传感器,才能更好地解决问题。
本期作者

华南理工大学 华南虎
RoboMaster校机器人队
生命不息、搞机不止的百人天团

本文来自 RoboMaster 技术智囊团华工机器人实验室,文章部分有修改。如果你也希望加入技术智囊团,请通过 robomaster@dji.com 联系我们。文章部分素材来自公共网络,侵权删除。

请问这篇文章对你有用吗?
「2019-11」【每周分享】陀螺仪:少了我你连直线都走不了!