【分享帖】开源PID无线调参方案
 沧海孤舟 | 1551 | 2018-08-09
沧海孤舟 | 1551 | 2018-08-09 PID_Regulator是一个旨在为RoboMaster机甲大师参赛队员提供能够进行PID实时无线调参的解决方案,由南京理工大学Alliance战队提供技术支持。
详情见github链接:https://github.com/jackychen227/PID_Regulator
概述
PID_Regulator主要包含以下三个部分的内容:
- PC端上位机
- 蓝牙无线串口传输
- 以STM32为开发平台的下位机DEMO
功能实现
- V1.0 根据协议能够实现PID实时无线调参功能
- V1.2 修复一些bug,与STM32通信demo测试通过
TODO
- PID曲线显示
PC端上位机
开发环境
- Windows 10
- Qt Creator 4.0.3 Based on Qt 5.6.1(MSVC 2013, 32 bit)
操作说明
- 硬件连接好PC和下位机
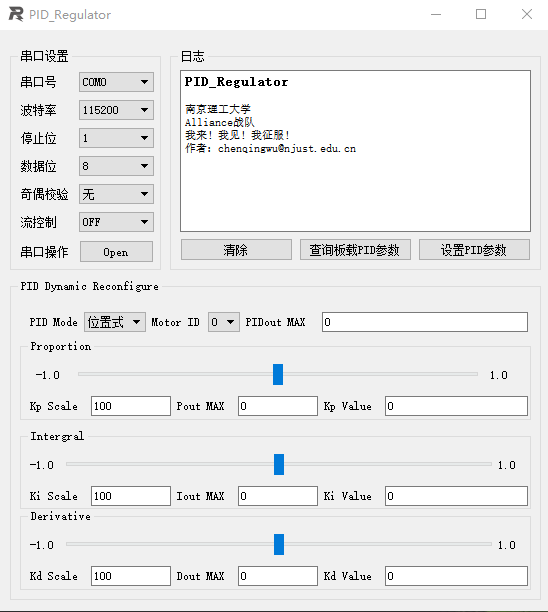
- 打开PID_Regulator.exe,打开串口即可进行数据传输
- 通过“串口设置”一栏可进行串口参数设置及操作
- 通过“PID Dynamic Reconfigure”一栏可进行PID参数设置
- 通过“日志”一栏可查看相关操作日志并进行PID参数设置与查询板载PID参数
- 剩余的操作请自行摸索
通信协议
STM32_DEMO
- 蓝牙串口通信
- 根据指定好的通信协议进行信息传输、解码与打包
- 参考RoboMaster/RoboRTS-Firmware进行PID的参数结构体设计
蓝牙无线串口传输
硬件
有线方案
USB转TTLCH340模块
无线方案
无线蓝牙模块
绿联 USB蓝牙适配器4.0版接收器(PC若自带蓝牙硬件支持则不用)
软硬件部署
初始化车载无线蓝牙串口之后,蓝牙模块与PC端蓝牙配对,之后可用正常的串口发送读取相关函数进行数据的无线传输,详细说明(TODO)
版权申明
NJUST Alliance.All rights reserved.
开源协议 GPL-3.0
请问这篇文章对你有用吗?
【分享帖】开源PID无线调参方案