【RM2021-工程机器人机械部分开源】东华大学DIODE战队
今年是团队第2年参加比赛,机械电控视觉累积的经验都不是很多,又加上今年的比赛规则与18 19年相差很大,在设计上参考了其他优秀战队稳定的设计。
今年比赛的一个关键点是金矿的抢夺,操作手在比较短的时间内完成矿石的对位以及操纵机器人夹取金矿,采矿的过程中机器人也会发生碰撞。而且一次携带矿石的数量也非常的关键。于是我们得出来的方案是 正面采矿 机构扛撞 可以携带3~4个矿石 能采地矿。
正面采矿的意义在于,能在没有视觉的情况下快速稳定的踩到矿,操作手通过图传的视角就可以观看金矿的位置,并且根据UI实现对位,不用再转接其他摄像头,不会造成不必要的模糊和延时。
因为在每局比赛的4分钟后,三个金矿会相继落下,工程机器人留有携带三个金矿的能力,能更好的夺取经济。地面夹取矿石算是一个战略性的东西。通过打完分区赛发现矿石基本上不太容易掉到地上,相信在全国赛中会有更深的战略开发,工程夹取地矿的功能得以展现。
今年比赛的一个关键点是金矿的抢夺,操作手在比较短的时间内完成矿石的对位以及操纵机器人夹取金矿,采矿的过程中机器人也会发生碰撞。而且一次携带矿石的数量也非常的关键。于是我们得出来的方案是 正面采矿 机构扛撞 可以携带3~4个矿石 能采地矿。
正面采矿的意义在于,能在没有视觉的情况下快速稳定的踩到矿,操作手通过图传的视角就可以观看金矿的位置,并且根据UI实现对位,不用再转接其他摄像头,不会造成不必要的模糊和延时。
因为在每局比赛的4分钟后,三个金矿会相继落下,工程机器人留有携带三个金矿的能力,能更好的夺取经济。地面夹取矿石算是一个战略性的东西。通过打完分区赛发现矿石基本上不太容易掉到地上,相信在全国赛中会有更深的战略开发,工程夹取地矿的功能得以展现。
在第一版的工程中我们采用机械手的夹取方案,在减速箱和气动吸盘上做出了很多创新,可以实现基本的采矿,兑换矿石,但因其电控算法难度太高,作为新队伍很难完全实现机械手灵活的采集资源块,中期之后就放弃了此方案。从而第二版采用传统的机械爪方案,以采集金矿、救援、采集障碍块为主。前期方案的不合适导致工程组后期的时间紧迫,最后没有时间开发工程的视觉部分,电控部分也没有编写完善,但基本预期的功能已全部实现而且比较稳定。
第二版工程机器人的制作让小组成员学习到了很多新知识,对气动和焊接、机械设计有了很多的收获,终于有机会把课本所学的气动和单片机。机械原理等知识运用于实践。我们在捡取地面矿石的方面,做了一定的工作,但是在自动取矿及存放矿石的工作和其他队伍相比仍然不够,由于我们前期对比赛规则的解读不到位,以及技术上的不足。robomaster比赛对我们来说。是一个完全技术主导的比赛,团队成立第2年,很多技术属于未开发的状态,整个赛季花了很多时间在技术的探索,而不是技术的研发上,比赛规则相关的内容都没有更好的挖掘,到比赛的最后战场上,我们的车辆还会出这样那样的问题,下个赛季我们将会对采矿机构和地面抓取机构进行重新的探索设计。此次分区赛的工程将会作为团队的基本保底方案。
工程的机械设计很大程度上参考19年东北大学和上海交通大学的设计,十分感谢他们战队的开源,给我们新队伍开阔了技术方向,我们才有机会进行创新和坐稳结构,在赛季中我们十分注重与其他优秀战队的交流,学习吸收优秀的机构设计。工程机器人的设计理念是在模仿中寻求创新,三人行必有我师,每一个方案都有其出彩和改进的地方。
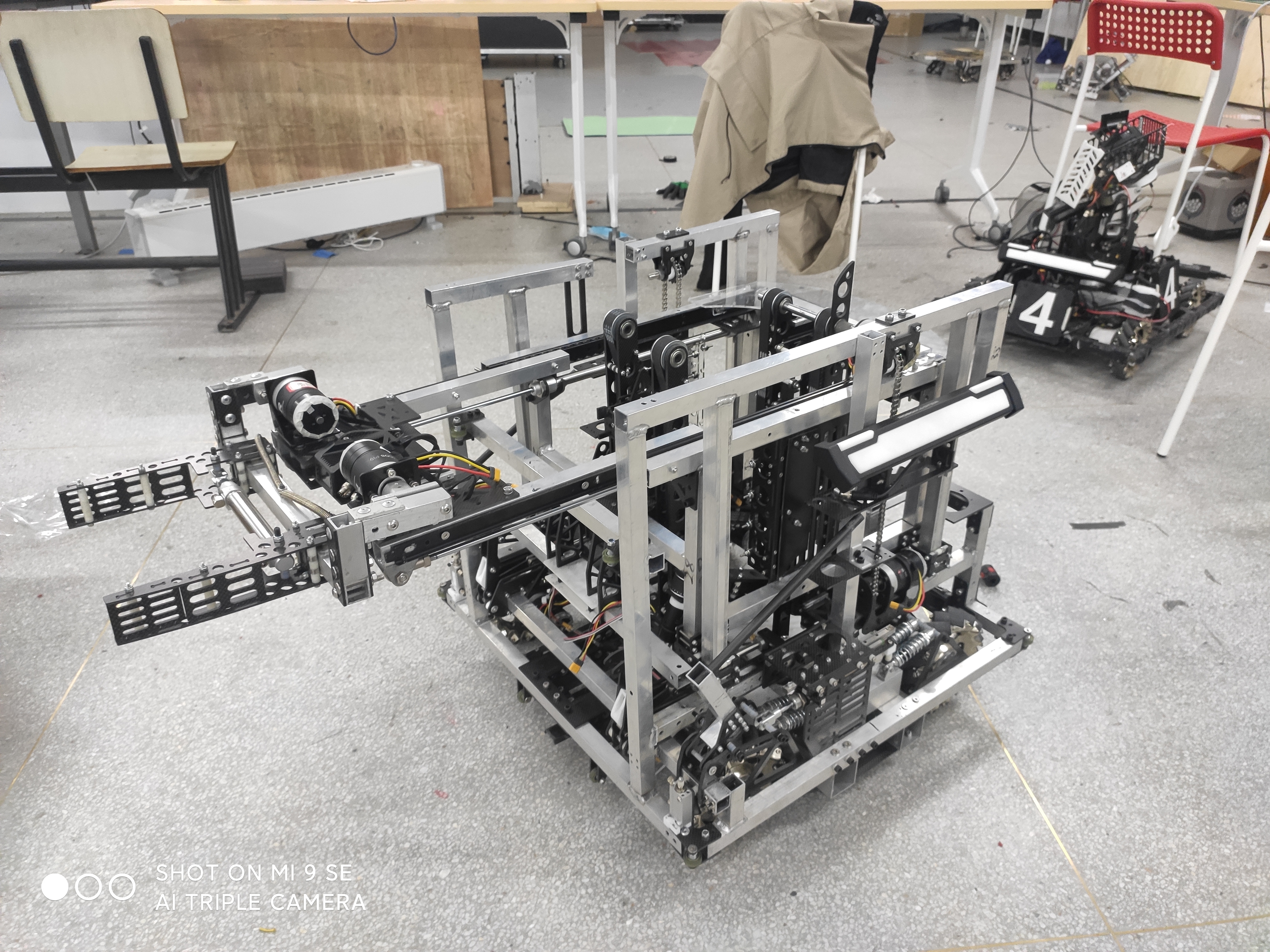
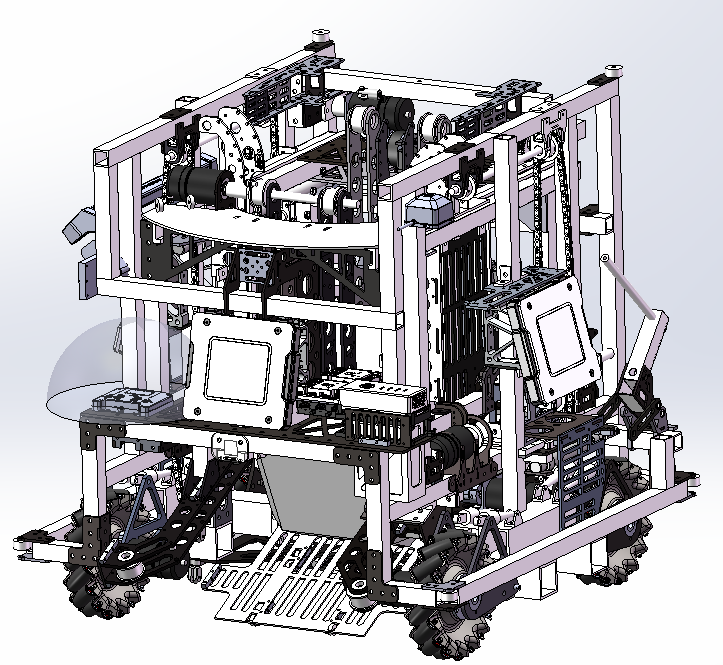
机器人如下图:
模型链接:
链接: https://pan.baidu.com/s/1LATmH0W0dBz8eHr7S-3Ycw 提取码: xyt6
![}0LD[E]]3FL(0FX4C`C4I5H.png](https://hz-rm-bbs-web-prod.oss-cn-hangzhou.aliyuncs.com/attachment/pre/v1/202106/25/192609jlxk0gdurziexadg.png)
请问这篇文章对你有用吗?
【RM2021-工程机器人机械部分开源】东华大学DIODE战队