哨兵原型机
本帖最后由 lijie 于 2015-4-2 23:06 编辑
[postbg]2.jpg[/postbg]最近看到大家都在分享一些哨兵机构方面的资料,我也来凑个热闹。
话不多说,直接上图
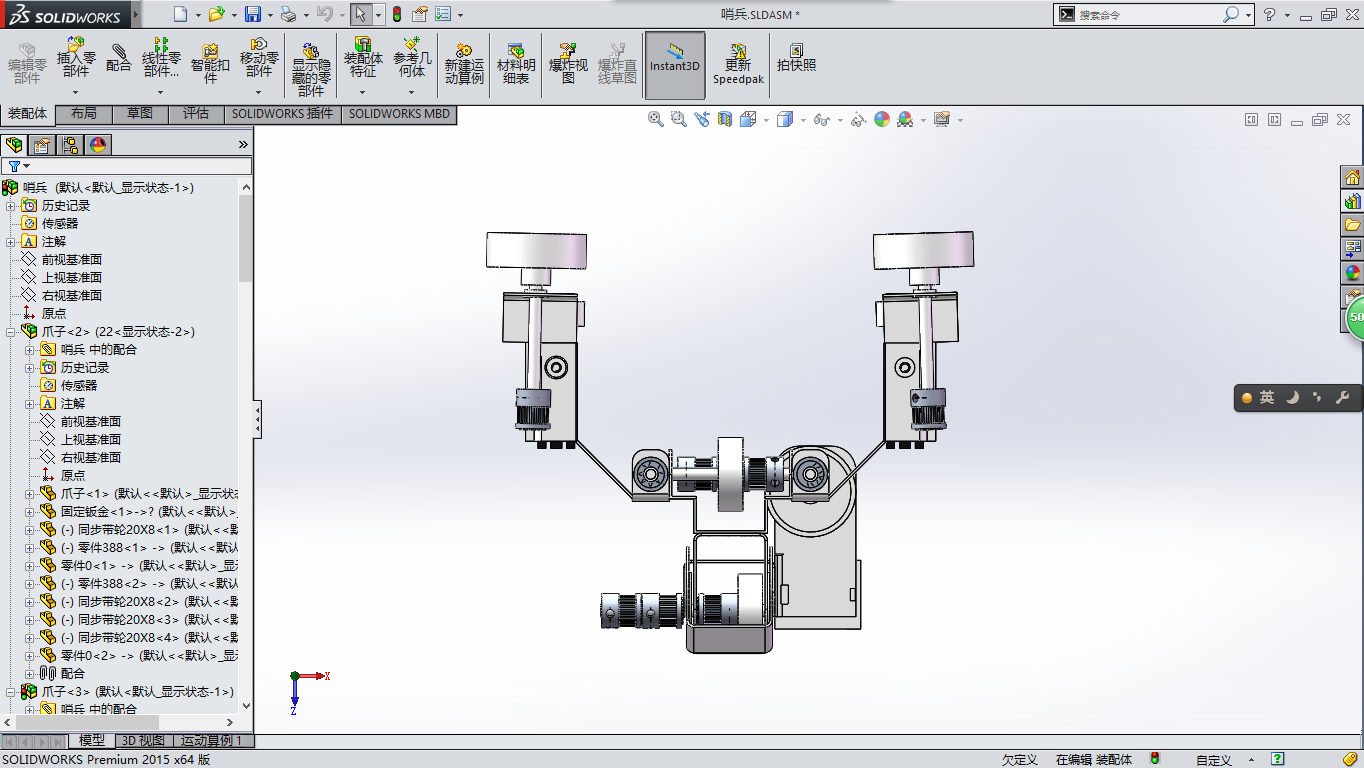
在启动区的姿态:

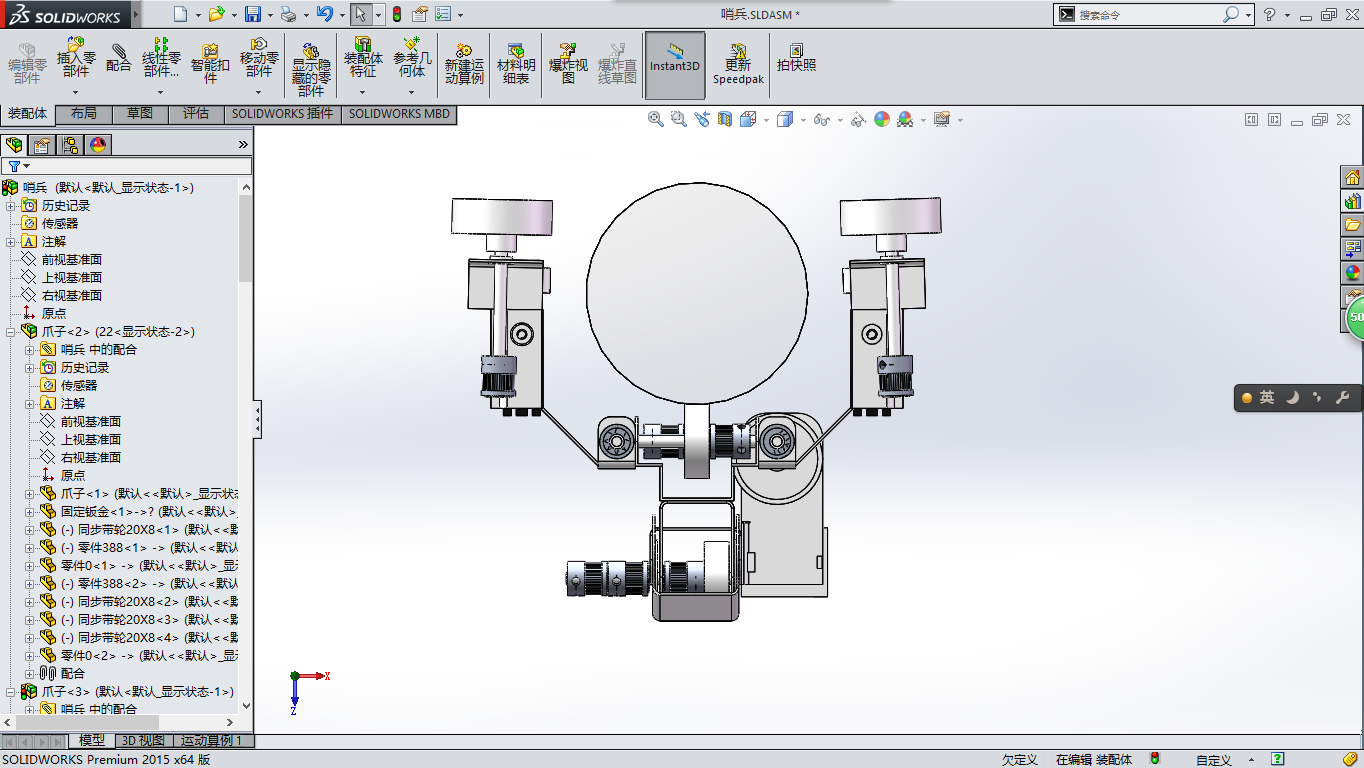
出发到达杆子的姿态:
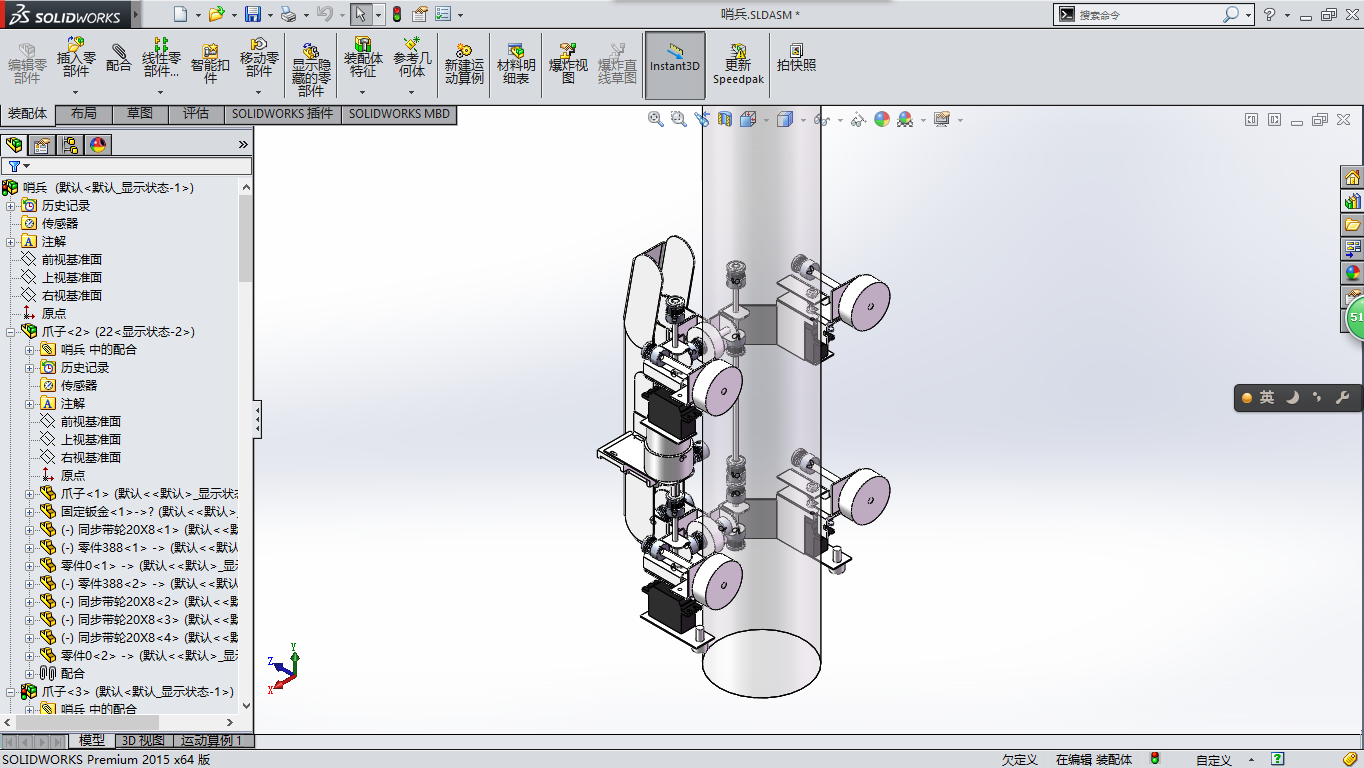
加紧杆子的姿态:
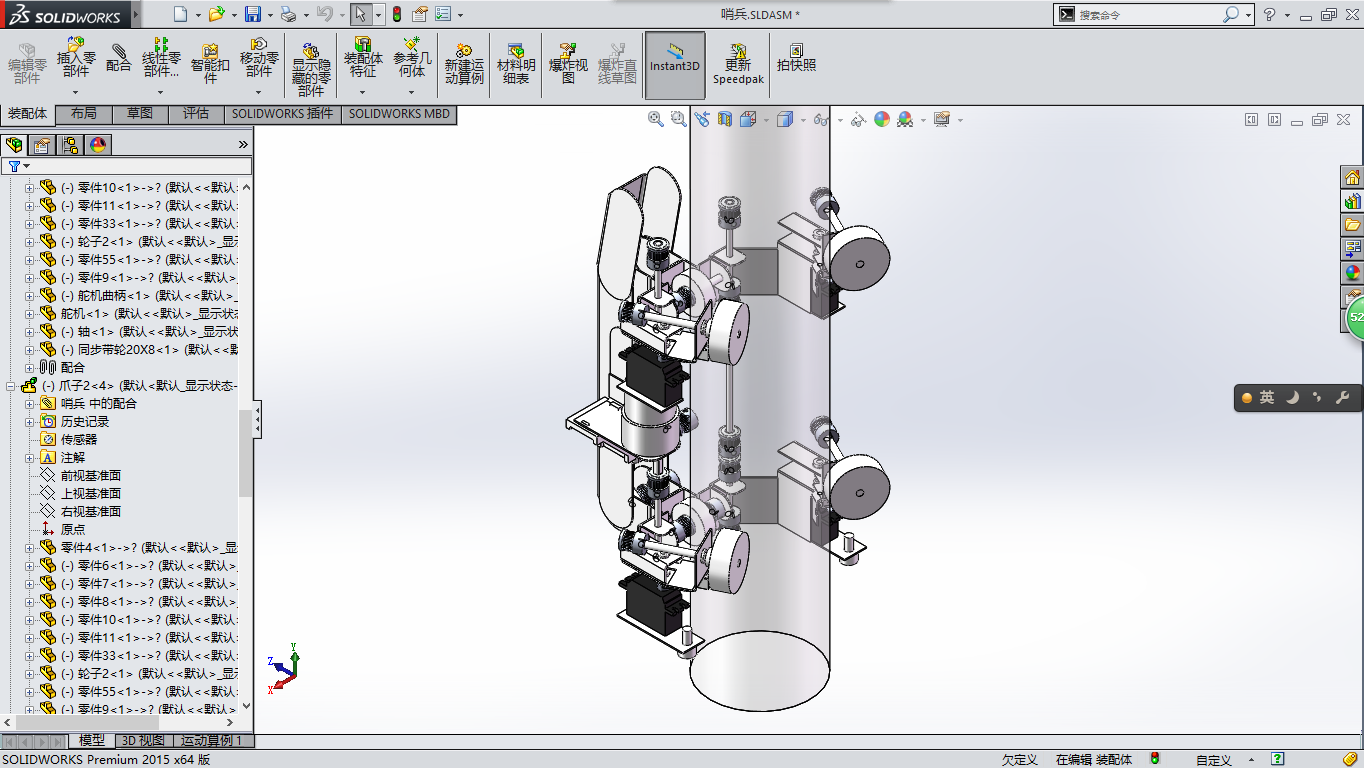

开始爬行,爬行中的各视角姿态图:
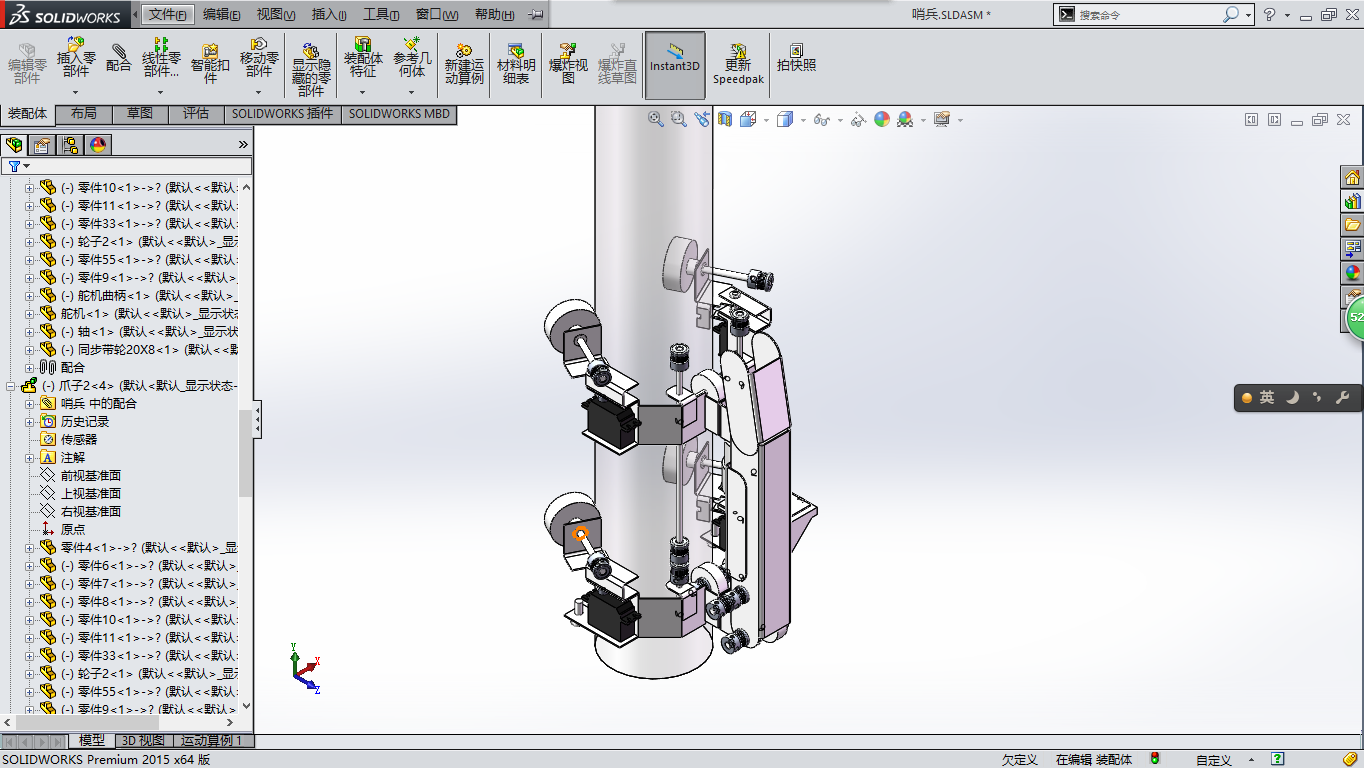

摄像头放置在头部,图中未画,因为到时候直接买一个云台安好就ok了。
所有轮子动力的传动只用了一个电机,主要通过轴传动和带传动实现了哨兵从启动区到达杆子,再爬杆的过程,对于加紧机构一个用到的是舵机控制,但这并不是主要的力,只是一个控制元件,主要的加紧动力这里也不分析了,一来嘛是鸡蜜,二来嘛大家看了之后能动动脑筋想想,想一个自己的解决方案,我觉得就很不错了。如果大家有想到的可以回复喔,我也可以参考参考大家的思路,说不定比我的更好呢。:$
请问这篇文章对你有用吗?
哨兵原型机