【RM2023-双球轮平衡步兵机械开源】国防科技大学
国防科技大学-军临战队
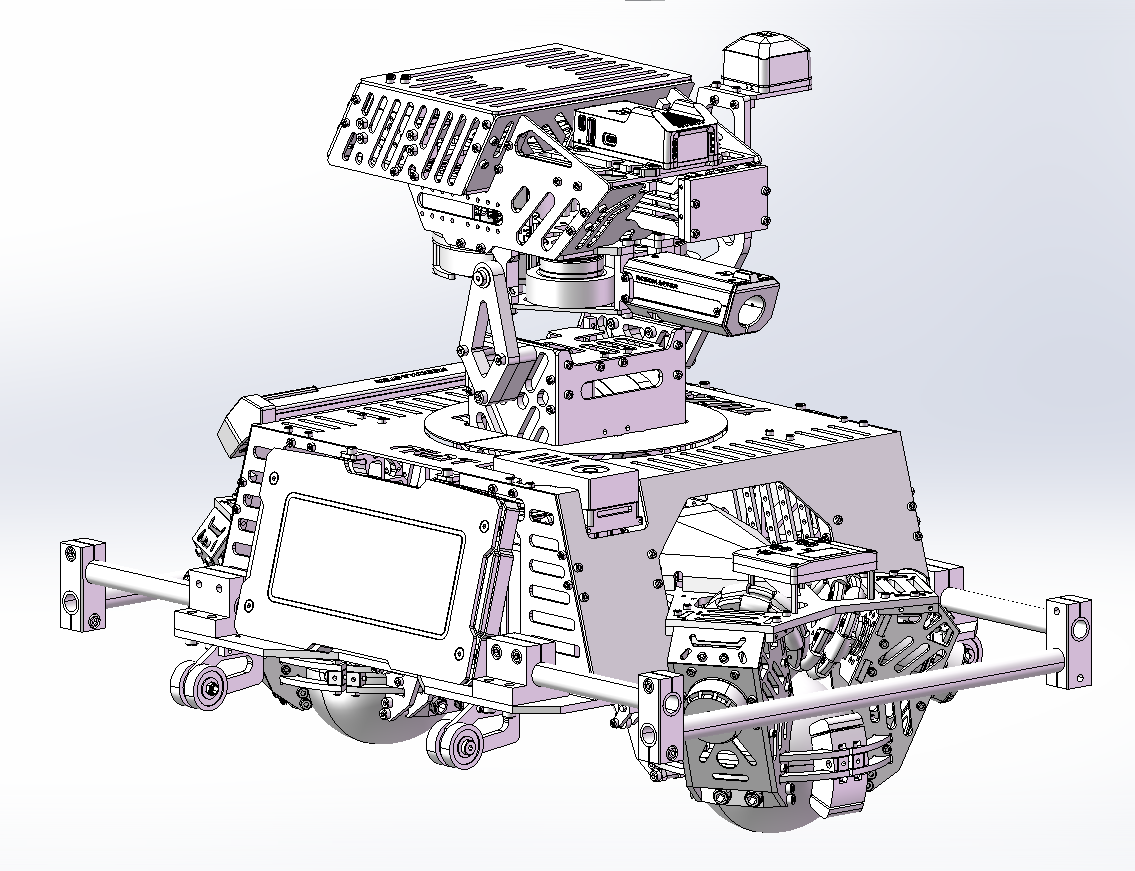
全向双球轮平衡步兵
· 本项目开源了机械结构设计、球轮设计说明和展示效果,分别放置于【三维图纸】【二维图纸】文件夹、【说明文档】文件夹和【效果展示】文件夹中。
·【三维图纸】文件夹里的step文件打开之后,会出现一些体积较大的规则模型方块(如锥体,球体,棱锥等),这些是设计过程中为保证裁判系统正确安装而绘制的安装体积示意模型,可以单独将这些表征体积模型的实体隐藏以展示原本的裁判系统模型。
·【二维图纸】文件夹里的sldprt请用sw2020或以上打开。
·【说明文档】包含了作者的联系方式,欢迎进行技术交流。作者水平能力有限,如有不足,敬请诸位大佬批评指正!= ̄ω ̄=
开源链接:https://pan.baidu.com/s/11UJAN7qyfq8ZvSYDrJ42tw?pwd=JLZD
提取码:JLZD
##使用者请注意##
1.本开源仅限于RoboMaster参赛队之间队内交流使用,不得用于任何商用行为。
2.本开源的最终解释权为国防科技大学军临战队所有。
全向双球轮平衡步兵


· 本项目开源了机械结构设计、球轮设计说明和展示效果,分别放置于【三维图纸】【二维图纸】文件夹、【说明文档】文件夹和【效果展示】文件夹中。
·【三维图纸】文件夹里的step文件打开之后,会出现一些体积较大的规则模型方块(如锥体,球体,棱锥等),这些是设计过程中为保证裁判系统正确安装而绘制的安装体积示意模型,可以单独将这些表征体积模型的实体隐藏以展示原本的裁判系统模型。
·【二维图纸】文件夹里的sldprt请用sw2020或以上打开。
·【说明文档】包含了作者的联系方式,欢迎进行技术交流。作者水平能力有限,如有不足,敬请诸位大佬批评指正!= ̄ω ̄=
开源链接:https://pan.baidu.com/s/11UJAN7qyfq8ZvSYDrJ42tw?pwd=JLZD
提取码:JLZD
##使用者请注意##
1.本开源仅限于RoboMaster参赛队之间队内交流使用,不得用于任何商用行为。
2.本开源的最终解释权为国防科技大学军临战队所有。
请问这篇文章对你有用吗?
【RM2023-双球轮平衡步兵机械开源】国防科技大学