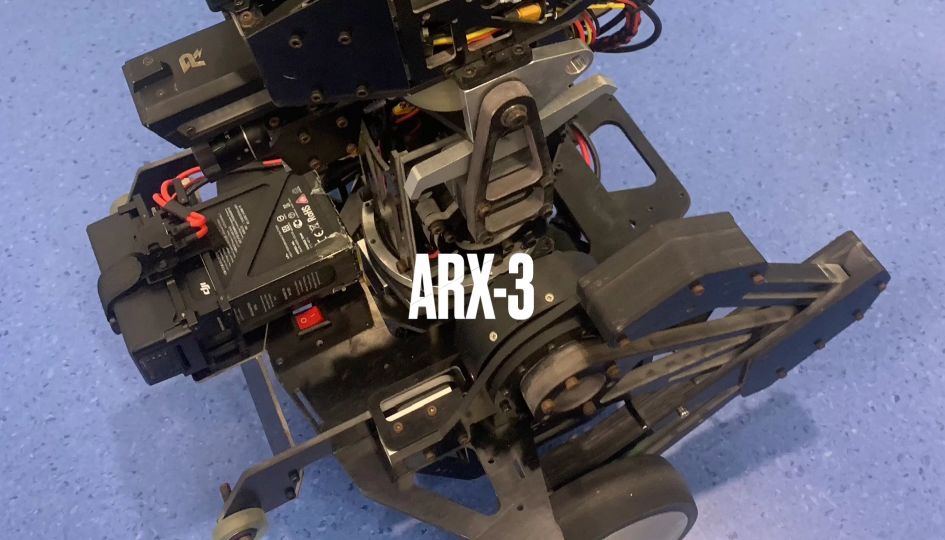
【RM2021-ARX-平衡步兵机器人开源项目】
此前并无任何轮足加装云台的机器人可参考,在实际设计以及调试过程中遇到了诸多困难。
本开源目的在推动轮足机器人的应用场景。目前已经实现除后空翻,包括跳跃,阻抗,陀螺,高度自适应,侧抗冲击,缓冲跳跃,转弯补偿等。
本次开源给大家,以此希望为轮足在赛场上能够得到广泛应用。以此将着重介绍设计关键点,以及难点解决方式,对于基础设计在此不多赘述。
致谢:在这里感谢20赛季上海交通大学 开源一款稳定的上供弹云台方案,此前本队偏向侧供弹方案,在平衡步兵由于限体积限制,因此在此基础开源基础上进行了修改适配,缩短了整体的研发进程。

链接:https://pan.baidu.com/s/1b4X0iAdH9awweu9WNnuvZg
提取码:ARXs
--来自百度网盘超级会员V6的分享

权利声明
1.本次开源项目出自哈尔滨理工大学(荣成校区)SPARK战队,作品仅用于技术交流,未经作者允许,不得作任何商业用途;
2.对非法转载者,作者保留采用法律手段追究的权利;
3.本开源目的在于突破现有框架,推动轮足机器人的应用场景;
4.本开源内容最终解释权归哈尔滨理工大学(荣成校区)SPARK战队所有。
请问这篇文章对你有用吗?
【RM2021-ARX-平衡步兵机器人开源项目】