【分享帖】智能小车DIY全攻略
Jellyfish
1819
0
24
2016-02-22
要讨论智能小车DIY,首先应明确定义何谓“智能小车”?
所谓“智能小车”,按笔者的理解应该是:
具备感知环境能力,并且能对之做出相应反应的、能自动行驶的小车。之所以称之为“智能小车”,其与遥控车模和玩具的最大差别在于:能对环境做出反应,并且能脱离人工操纵自动行驶。
至于感知环境的能力强弱、反应的准确与否只是其“智能”的高低,并不改变“智能小车”的实质。按此判断,寻迹小车、自动避障小车算,用手机遥控的小车、通过WiFi 控制的小车严格说不算,虽然看上去技术比前者先进,但就其本质而言,只能算是换了个遥控的通道和遥控器,其本质还是遥控车。除非小车执行的是“跟踪一个物体、前进到某个位置”等高级命令,而不是那种左转、右转、前进、后退之类的简单动作.
根据此定义,智能小车应该包含以下三部分:
1、 传感器 —— 检测环境;
2、 控制器 —— 根据传感器信息做出反应,发出小车控制信号或命令;
3、 小车 —— 根据控制器命令或控制信号行驶。
前两部分所有智能体都需要,并非智能小车专有。如智能飞机、智能轮船、机器人等,本文名为“智能小车DIY 全攻略”,故先讨论智能小车特有的部分 —— 小车,其余部分另行撰文探讨。
其次要界定的是:本文讨论的是“车”,默认是以轮子为行走主体,所有其它形式不在讨论之列。
从两个角度展开:
1、 从小车本身分析,汇总各类小车的驱动形式,探讨其特征,以作为DIY 选择的依据;
2、 从DIY 者的需求分析,结合上述各类小车的优劣,给出实施的建议,供DIY 者参考。
二、小车大观
谈到智能小车,首先应探讨轮子,其次探讨轮子的分布,最后再研究用什么驱动轮子?如何驱动?如何走好?
关于小车的轮子以及轮子分布形式,《自主移动机器人导论》(西安交大出版社,ISBN7-5605-2161-4)一书描述的非常详细,在此将直接引用(有下划线处)。
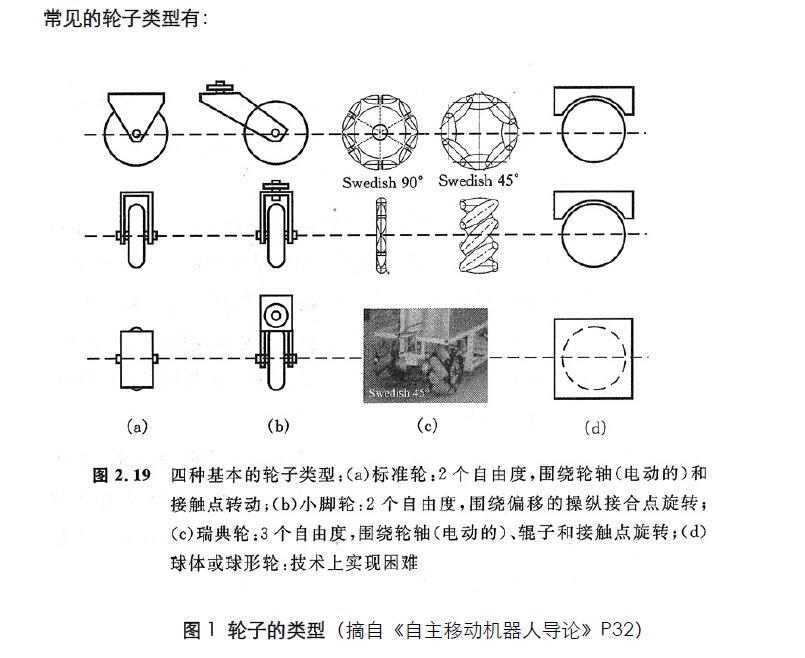
2.1 轮子的种类
前面已经说过,本文只讨论以轮子为行走基础的小车。首先探讨轮子有哪些种类?
文章里面还有大量干货,大家可以下载后学习一下。
8个金币不算贵吧。:lol
行情好的话我这几天会继续发几篇牛货。
所谓“智能小车”,按笔者的理解应该是:
具备感知环境能力,并且能对之做出相应反应的、能自动行驶的小车。之所以称之为“智能小车”,其与遥控车模和玩具的最大差别在于:能对环境做出反应,并且能脱离人工操纵自动行驶。
至于感知环境的能力强弱、反应的准确与否只是其“智能”的高低,并不改变“智能小车”的实质。按此判断,寻迹小车、自动避障小车算,用手机遥控的小车、通过WiFi 控制的小车严格说不算,虽然看上去技术比前者先进,但就其本质而言,只能算是换了个遥控的通道和遥控器,其本质还是遥控车。除非小车执行的是“跟踪一个物体、前进到某个位置”等高级命令,而不是那种左转、右转、前进、后退之类的简单动作.
根据此定义,智能小车应该包含以下三部分:
1、 传感器 —— 检测环境;
2、 控制器 —— 根据传感器信息做出反应,发出小车控制信号或命令;
3、 小车 —— 根据控制器命令或控制信号行驶。
前两部分所有智能体都需要,并非智能小车专有。如智能飞机、智能轮船、机器人等,本文名为“智能小车DIY 全攻略”,故先讨论智能小车特有的部分 —— 小车,其余部分另行撰文探讨。
其次要界定的是:本文讨论的是“车”,默认是以轮子为行走主体,所有其它形式不在讨论之列。
从两个角度展开:
1、 从小车本身分析,汇总各类小车的驱动形式,探讨其特征,以作为DIY 选择的依据;
2、 从DIY 者的需求分析,结合上述各类小车的优劣,给出实施的建议,供DIY 者参考。
二、小车大观
谈到智能小车,首先应探讨轮子,其次探讨轮子的分布,最后再研究用什么驱动轮子?如何驱动?如何走好?
关于小车的轮子以及轮子分布形式,《自主移动机器人导论》(西安交大出版社,ISBN7-5605-2161-4)一书描述的非常详细,在此将直接引用(有下划线处)。
2.1 轮子的种类
前面已经说过,本文只讨论以轮子为行走基础的小车。首先探讨轮子有哪些种类?
文章里面还有大量干货,大家可以下载后学习一下。
8个金币不算贵吧。:lol
行情好的话我这几天会继续发几篇牛货。
文章标签
请问这篇文章对你有用吗?
【分享帖】智能小车DIY全攻略