【分享帖】论CAN总线对电机的控制与接收数据
65814
0
12
2020-03-30
从STM32开始的RoboMaster生活:进阶篇 VII [CAN]
1.0 什么是CAN?
1.1 背景 + 定义
2.1 Differential signal 差分信号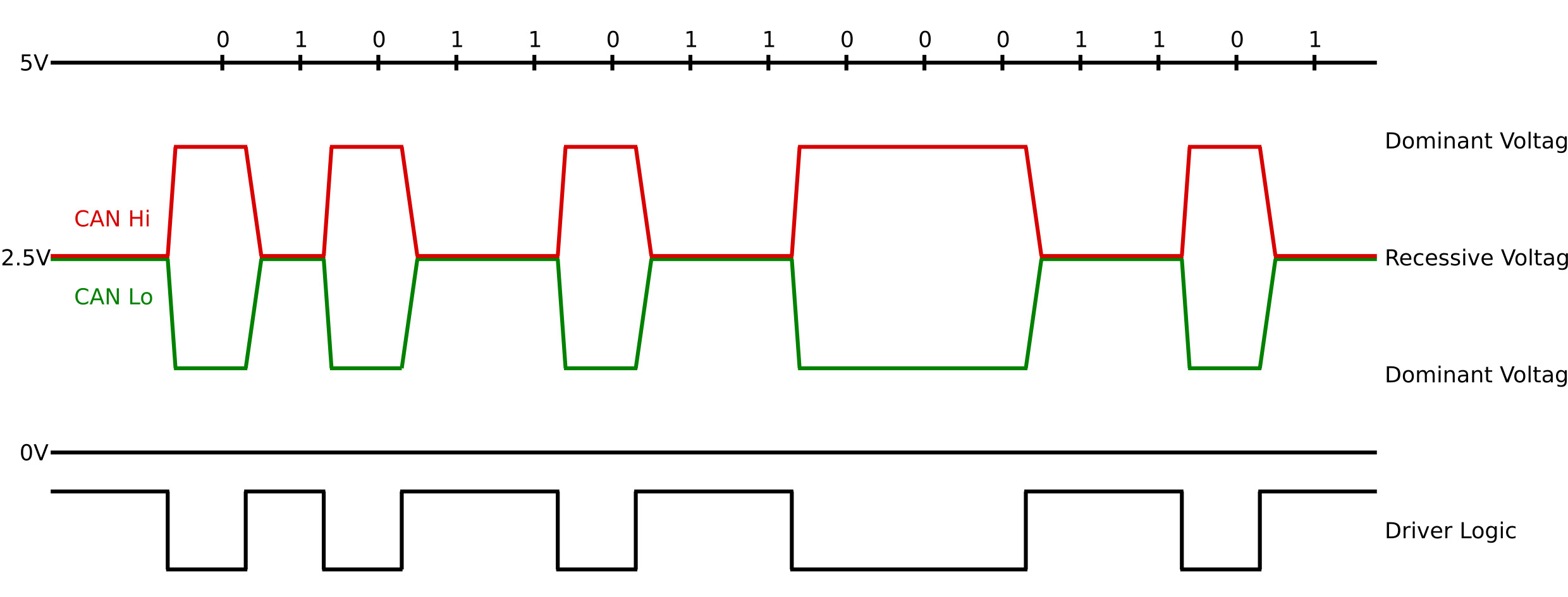
3.1 图解CAN内部实现机构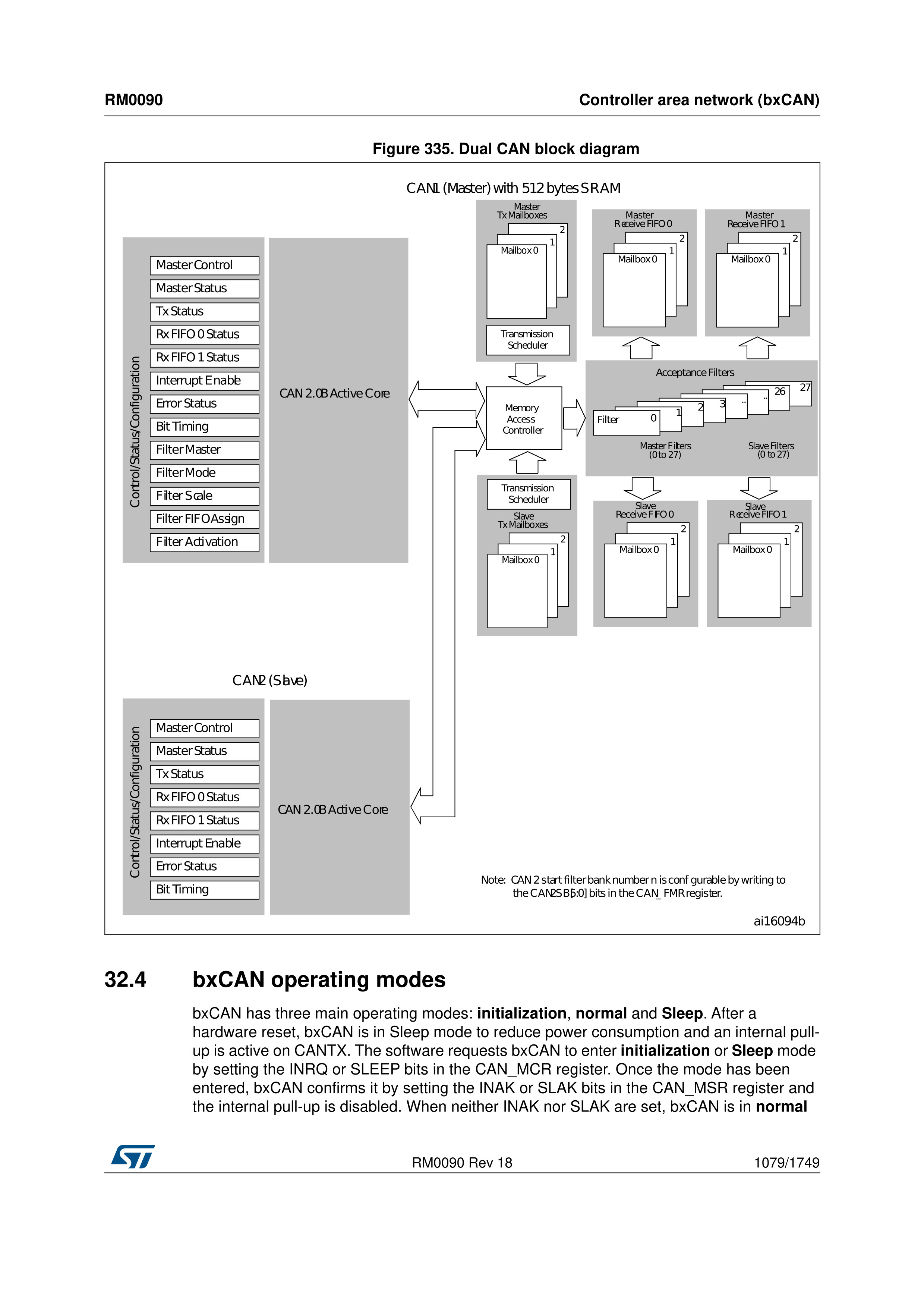
[code]HAL_StatusTypeDef HAL_CAN_ActivateNotification(CAN_HandleTypeDef *hcan, uint32_t ActiveITs);[/code]
[code]HAL_StatusTypeDef HAL_CAN_Start(CAN_HandleTypeDef *hcan);[/code]
[code]HAL_StatusTypeDef HAL_CAN_ConfigFilter(CAN_HandleTypeDef *hcan, CAN_FilterTypeDef *sFilterConfig);[/code]
[code]HAL_StatusTypeDef HAL_CAN_AddTxMessage(CAN_HandleTypeDef *hcan, CAN_TxHeaderTypeDef *pHeader, uint8_t aData[], uint32_t *pTxMailbox);[/code]
[code]uint32_t HAL_CAN_IsTxMessagePending(CAN_HandleTypeDef *hcan, uint32_t TxMailboxes);[/code]
[code]void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan);
HAL_StatusTypeDef HAL_CAN_GetRxMessage(CAN_HandleTypeDef *hcan, uint32_t RxFifo, CAN_RxHeaderTypeDef *pHeader, uint8_t aData[]);
5.1 项目简介
因为论坛字数限制,详情请到 https://alchemicronin.github.io/posts/59eedfd8.html 观看
5.3 效果展示
项目&教程仓库:-STM32-RoboMaster-
1.0 什么是CAN?
1.1 背景 + 定义
1.2 意义 + 优势Controller Area Network 控制器局域网络 是ISO国际标准化的串行通信协议。在汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。为适应“减少线束的数量”、“通过多个LAN,进行大量数据的高速通信”的需要,1986 年德国电气商博世公司开发出面向汽车的CAN 通信协议。此后,CAN 通过ISO11898及ISO11519进行了标准化,在欧洲已是汽车网络的标准协议。CAN 的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持。近年来,它具有的高可靠性和良好的错误检测能力受到重视,被广泛应用于汽车计算机控制系统和环境温度恶劣、电磁辐射强及振动大的工业环境。
2.0 CAN原理
2.1 Differential signal 差分信号
从上图我们可以看到,与图中下部分的普通信号不同,并不是低电平表示0高电平表示1,而是当两根数据线在同一时刻,如果有电压差表示0无电压差表示1。
相对于单信号线传输的方式,使用差分信号传输具有如下优点:
- 抗干扰能力强:当外界存在噪声干扰时,几乎会同时耦合到两条信号线上,而接收端只关心两个信号的差值,所以外界的共模噪声可以被完全抵消。
- 有效抑制电磁干扰:同样的道理,由于两根信号的极性相反,他们对外辐射的电磁场可以相互抵消,耦合的越紧密,泄放到外界的电磁能量越少。
- 时序定位精确:由于差分信号的开关变化是位于两个信号的交点,而不像普通单端信号依靠高低两个阈值电压判断,因而受工艺,温度的影响小,能降低时序上的误差,同时也更适合于低幅度信号的电路
由于差分信号线具有这些优点,所以在USB协议,485 协议,以太网协议,及 CAN 协议的物理层中,都使用了差分信号传输。
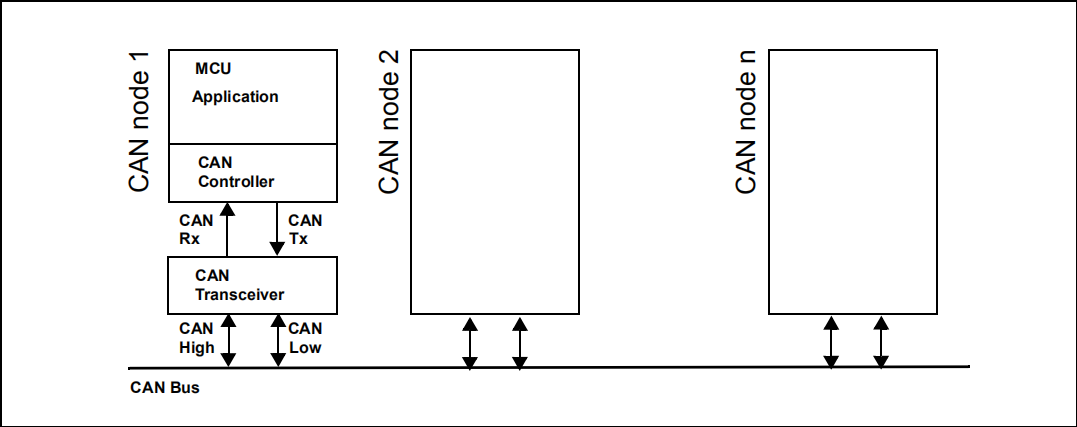
虽然CAN是通过差分信号传输数据,但是MCU不是,所以需要CAN Transceiver来把MCU的普通信号转换成差分信号。STM32并不自己提供该功能,所以需要外接CAN Transceiver。
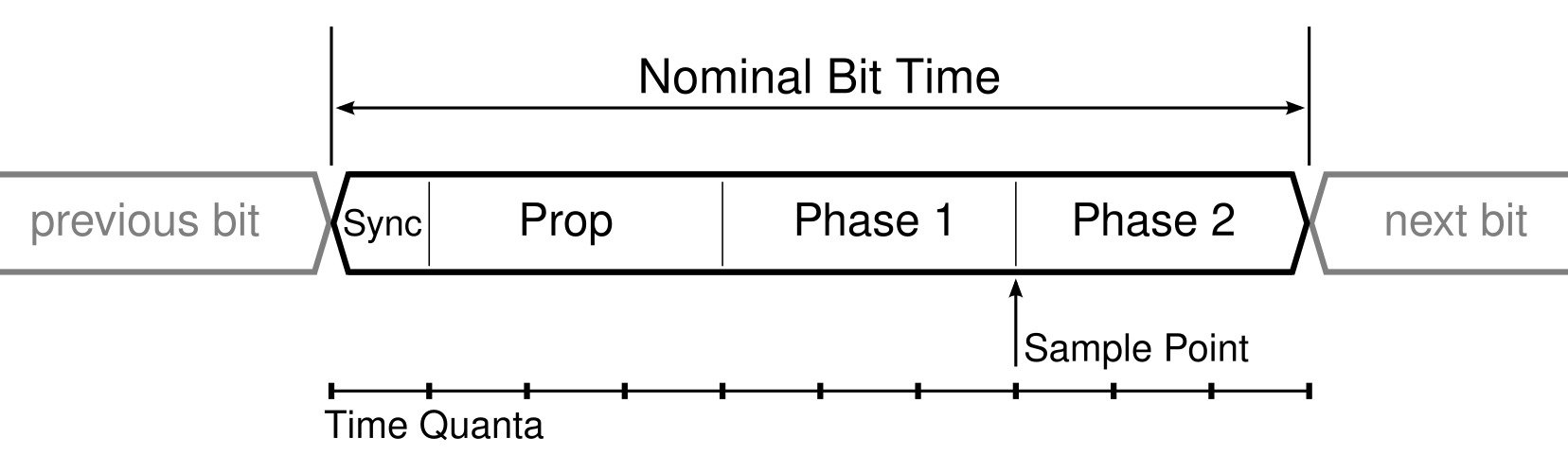
2.2 Time Quantum 时间量子- 数据的每一Bit位,都分为4段
- 同步段 ( SS / Sync )
- 传播时间段 ( PTS / Prop )
- 相位缓冲段 1 ( PBS1 / Phase 1 )
- 相位缓冲段 2 ( PBS2 / Phase 2 )
- 而这每一段又由称为Time Quantum 时间量子的最小时间单位组成
在CAN标准中,分为标准格式和扩展格式,而帧也分为5种
- 数据帧
- 遥控帧
- 错误帧
- 过载帧
- 间隔帧
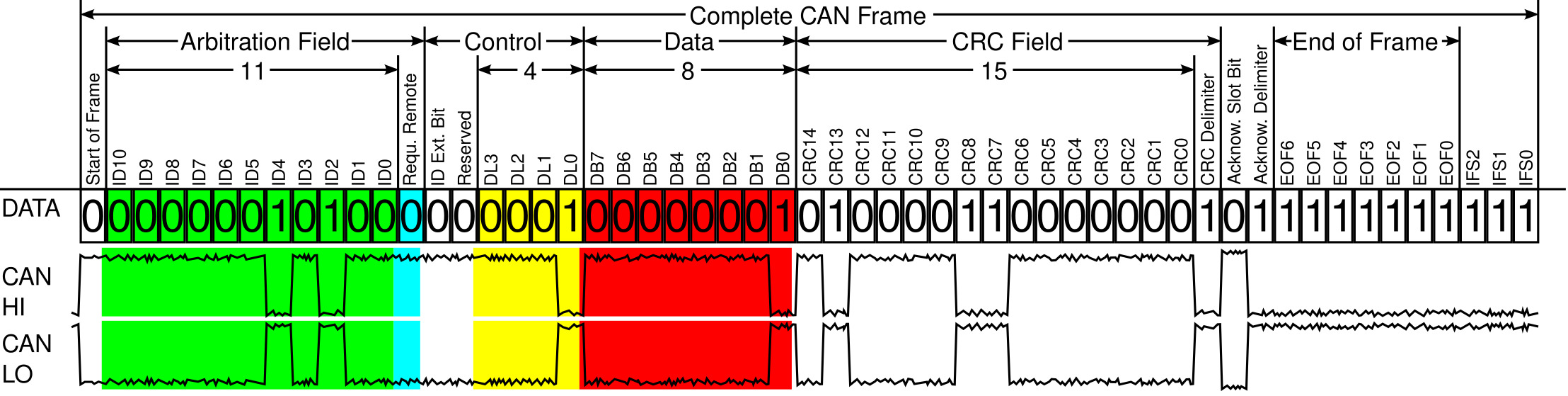
我们这里主要解析一下数据帧
每个数据帧总共包含7个段
- Start of Frame 帧起始:表示数据帧开始的段
- Arbitration Field 仲裁段:表示该帧优先级的段
- Control 控制段:表示数据的字节数及保留位的段
- Data 数据段:数据的内容,一帧可发送 0~8 个字节的数据
- CRC Field CRC段:检查帧的传输错误的段
- ACK Field ACK段:表示确认正常接收的段
- End of Frame 帧结束:表示数据帧结束的段
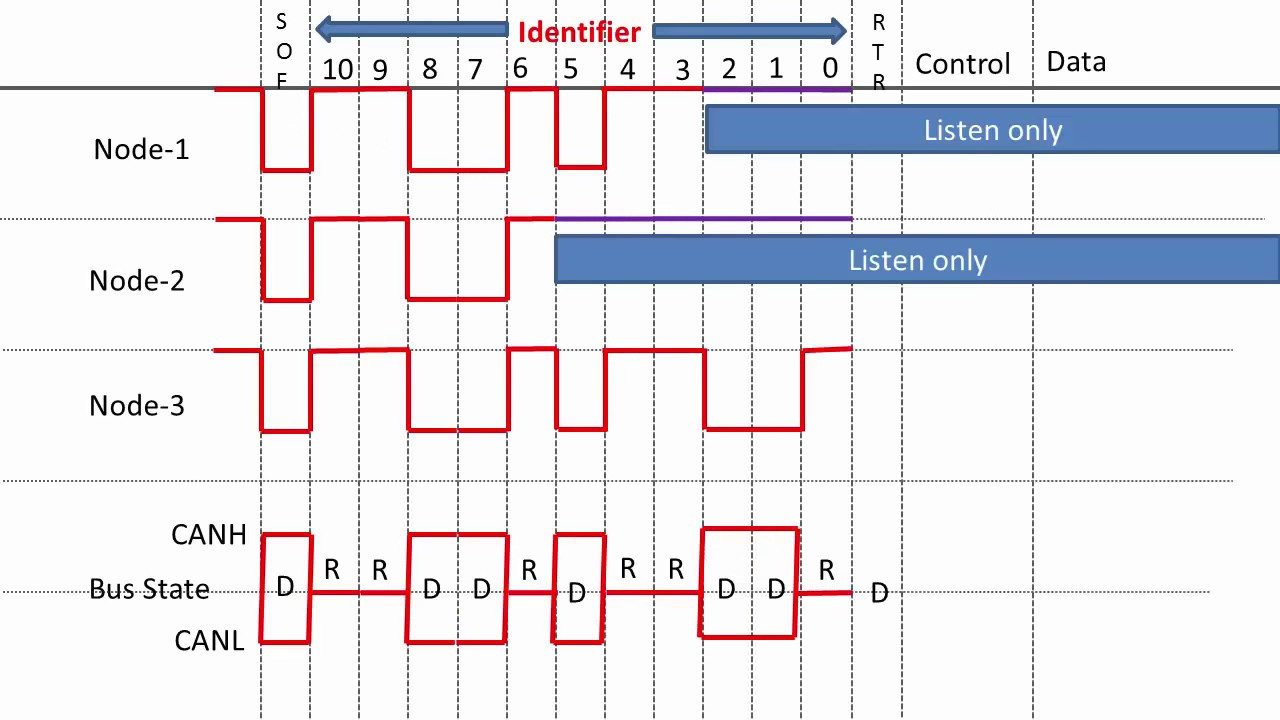
在CAN中,仲裁是为了解决当同一时刻有多个Node在试图发送信息的时候,让优先权最大的那个Node先发。在CAN中,1是隐性电平,0是显性电平,在ID中显性电平越靠前越多,也就是ID越小,优先权越大。在仲裁的时候,比如有上图中的3个Node同时发送数据,当他们同时发送帧ID的时候,CAN的特性之一就会起作用,隐性电平会被显性电平覆盖,也就是只要在同一时刻,CAN上既有Node发送隐性电平又有Node发送显性电平,那CAN上就只有显性电平,反过来说,只有当CAN上所有Node都只发送隐性电平的时候,CAN上才是隐性电平。这就是仲裁机制背后的物理机制。
然后接下来,我们继续谈谈仲裁的过程中到底发生了什么,继续上图的例子,在时刻5的时候,Node 2是隐性电平 ( 1 ) ,而其他Node是显性电平 ( 0 ) ,所以整个CAN上也是显性电平 ( 0 ) ,然后Node 2自己一对比自己的输入输出不同,很自觉得知道自己优先权比其他Node低,然后停止发送数据,转为监听模式,Node 1和Node 3继续仲裁。在时刻2的时候,Node 1是隐性电平 ( 1 ) ,而Node 3是显性电平 ( 0 ) ,所以Node 1也转为监听模式,最后当整个ID发送完,仲裁完成后,只有Node 3发现自己没事,就知道自己是优先权最大的那个,接下来就继续发送数据帧,而其他Node就暂停发送数据,一直监听Node 3的数据,直到Node 3发完数据,其他Node再继续仲裁下去,决定接下来的发送权。
3.0 STM32的CAN配置原理3.1 图解CAN内部实现机构
从图上我们可以看到,CAN 1与CAN 2为主从关系,CAN 1为Master ( 主 ) ,CAN 2为Slave ( 从 ) 。CAN 1和CAN 2有各自的3个发送邮箱,2个FIFO Buffer缓冲,6个接收邮箱。但是,28个Filter 过滤器却是共用的,我们可以规定,哪些Filter给那个CAN用,甚至可以在程序运行的时候调控。
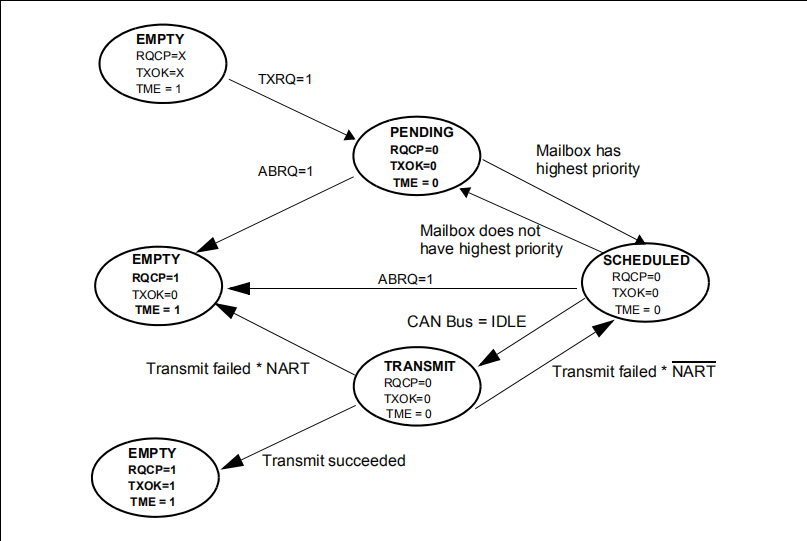
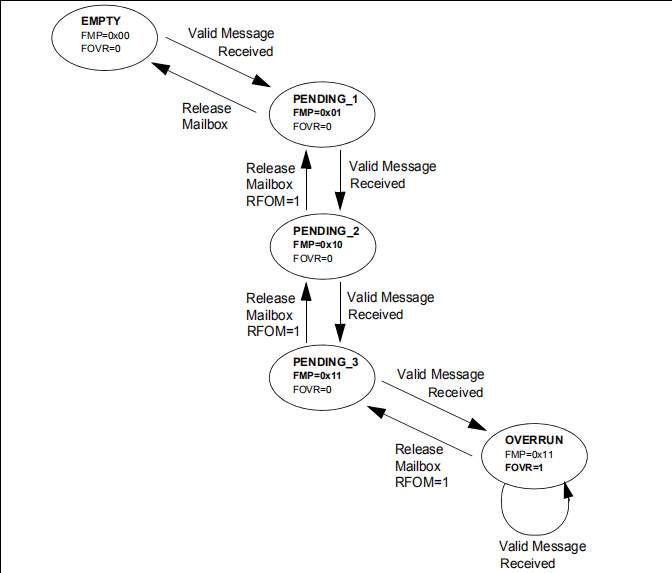
上面俩图是发送邮箱和接收邮箱的具体的流程和机制。具体的细节就实在太多了,本文毕竟不是参考手册,想更加深入的看官,可以去ST官方的Reference Manual查阅具体细节。
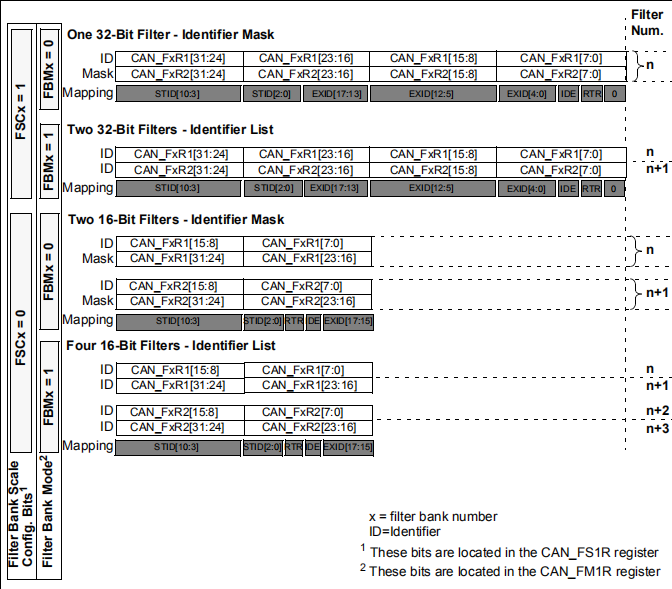
3.2 Filter 过滤器Filter 过滤器就很简单了,就是过滤接收到的每一帧的ID,如果符合特定条件,那就将该帧放入接收FIFO中。
Filter 过滤器有两种模式:
- Identifier List Mode 标识符列表模式:它把要接收报文的 ID 列成一个表,要求报文 ID 与列表中的某一个标识符完全相同才可以接收,可以理解为白名单管理
- Mask Mode 掩码模式:它把可接收报文 ID 的某几位作为列表,这几位被称为掩码,可以把它理解成关键字搜索,只要掩码(关键字)相同,就符合要求,报文就会被保存到接收FIFO
每种模式又有对应的16 Bit位,32 Bit位模式,具体的使用方法和区别,本文不深入讨论,这部分内容再出个完整的教程都足够了,所以这部分留给客官去看Reference Manuel来理解。
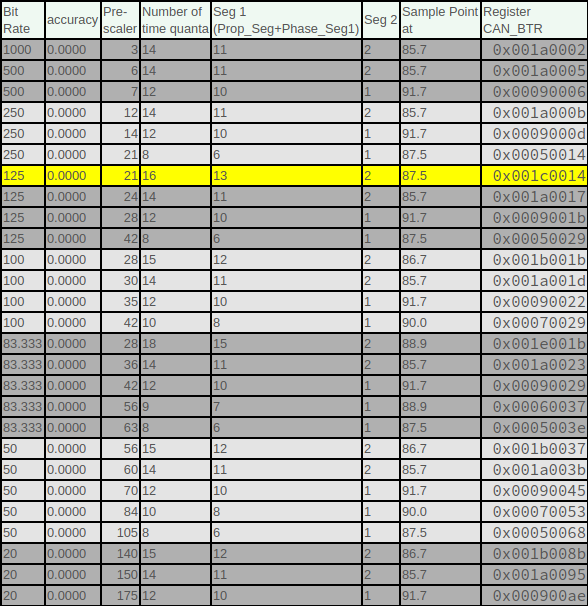
3.3 如何通过Bit Rate 比特率来选择Time Quantum 时间量子该图生成于CAN Bit Time Calculation,可以看出在iRM2018的时钟树配置下,42MHz的CAN总线,最推荐的是黄色的那条,是稳定和高速的交际范围,越往上越快,但是越不稳定,越往下越稳定,但是越慢。因为C620电调和M3508电机接收的比特率是1Mbps,所以我们只能选择最上面的那个最快的那组参数。
3.4 特殊功能选项- Automatic Bus-Off Management 自动离线管理:可以在出错时离线后适时自动恢复,不需要软件干预
- Automatic Retransmission 自动重传:使用本功能时,会一直发送报文直到成功为止
在用串口转接器后,可以在PWM接口连接上PC的RoboMaster Assitant来调试电机,重要的是可以调整电机的CAN数据发送频率,适当调低可以降低CPU的接收压力,把计算资源留给其他更加重要的功能。
4.0 CAN的用法[code]HAL_StatusTypeDef HAL_CAN_ActivateNotification(CAN_HandleTypeDef *hcan, uint32_t ActiveITs);[/code]
- 参数
- hcan:指向CAN配置结构体
- ActiveITs:表明哪个中断会被启动,开启改中断的消息提示
- 返回值
- HAL_StatusTypeDef:如果开启成功,返回HAL_OK;如果失败,返回HAL_ERROR
[code]HAL_StatusTypeDef HAL_CAN_Start(CAN_HandleTypeDef *hcan);[/code]
- 参数
- hcan:指向CAN配置结构体
- 返回值
- HAL_StatusTypeDef:如果开启成功,返回HAL_OK;如果失败,返回HAL_ERROR
[code]HAL_StatusTypeDef HAL_CAN_ConfigFilter(CAN_HandleTypeDef *hcan, CAN_FilterTypeDef *sFilterConfig);[/code]
- 参数
- hcan:指向CAN配置结构体
- sFilterConfig:指向Filter过滤器配置结构体
- 返回值
- HAL_StatusTypeDef:如果开启成功,返回HAL_OK;如果失败,返回HAL_ERROR
[code]HAL_StatusTypeDef HAL_CAN_AddTxMessage(CAN_HandleTypeDef *hcan, CAN_TxHeaderTypeDef *pHeader, uint8_t aData[], uint32_t *pTxMailbox);[/code]
- 参数
- hcan:指向CAN配置结构体
- pHeader:指向发送数据的配置结构体
- aData[]:指向需要发送的数据
- pTxMailbox:该函数会返回用于储存发送数据的发送邮箱编号到该变量
- 返回值
- HAL_StatusTypeDef:如果添加成功,返回HAL_OK;如果失败,返回HAL_ERROR
[code]uint32_t HAL_CAN_IsTxMessagePending(CAN_HandleTypeDef *hcan, uint32_t TxMailboxes);[/code]
- 参数
- hcan:指向CAN配置结构体
- TxMailboxes:指向发送数据的发送邮箱
- 返回值
- uint32_t:如果有发送数据正在等待发送,返回1;如果没有,返回0
[code]void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan);
- 在写代码的时候,在main.c中创建HAL_CAN_RxFifo0MsgPendingCallback函数
- 在该函数中填写在FIFO 0中已经没有正在等待接收的数据的时候开启中断,需要执行的代码
HAL_StatusTypeDef HAL_CAN_GetRxMessage(CAN_HandleTypeDef *hcan, uint32_t RxFifo, CAN_RxHeaderTypeDef *pHeader, uint8_t aData[]);
- 参数
- hcan:指向CAN配置结构体
- RxFifo:指向负责接收的FIFO
- pHeader:指向接收数据的配置结构体
- aData[]:指向需要接收的数据
- 返回值
- HAL_StatusTypeDef:如果接收成功,返回HAL_OK;如果失败,返回HAL_ERROR
5.1 项目简介
- CAN电机控制:通过CAN控制电机,并且在按下按钮时通过CAN读取电机运行数据
因为论坛字数限制,详情请到 https://alchemicronin.github.io/posts/59eedfd8.html 观看
5.3 效果展示
[media=x,760,570]http://player.bilibili.com/player.html?aid=242558868&bvid=BV1he411x7DN&cid=170233216?page=1[/media]
文章标签
请问这篇文章对你有用吗?
【分享帖】论CAN总线对电机的控制与接收数据