【RM2022-共轴麦轮平衡步兵开源】西交利物浦大学
lkhz
20438
1
13
2022-09-17
本帖为西交利物浦大学GMaster战队RoboMaster2022赛季共轴麦轮平衡步兵机械结构开源贴。
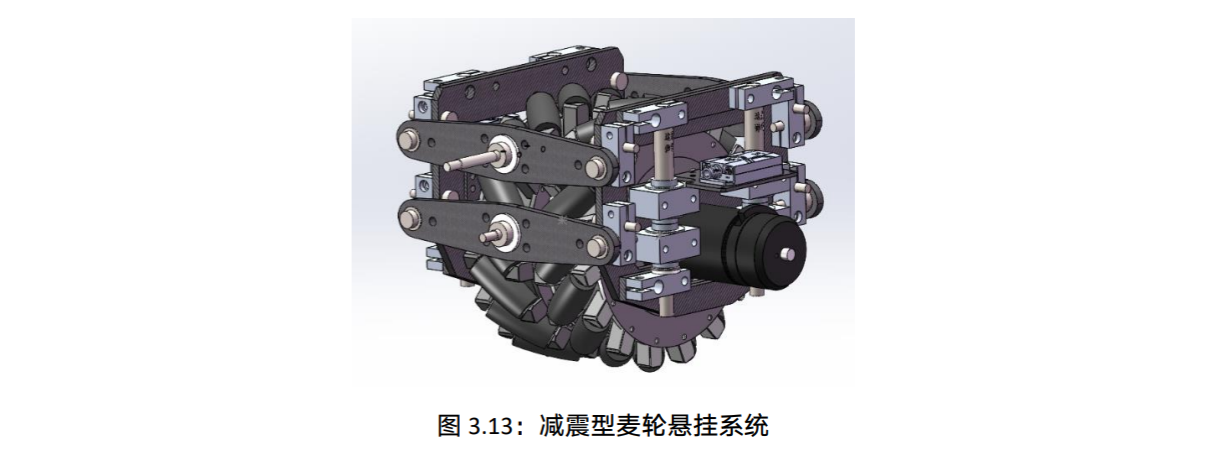
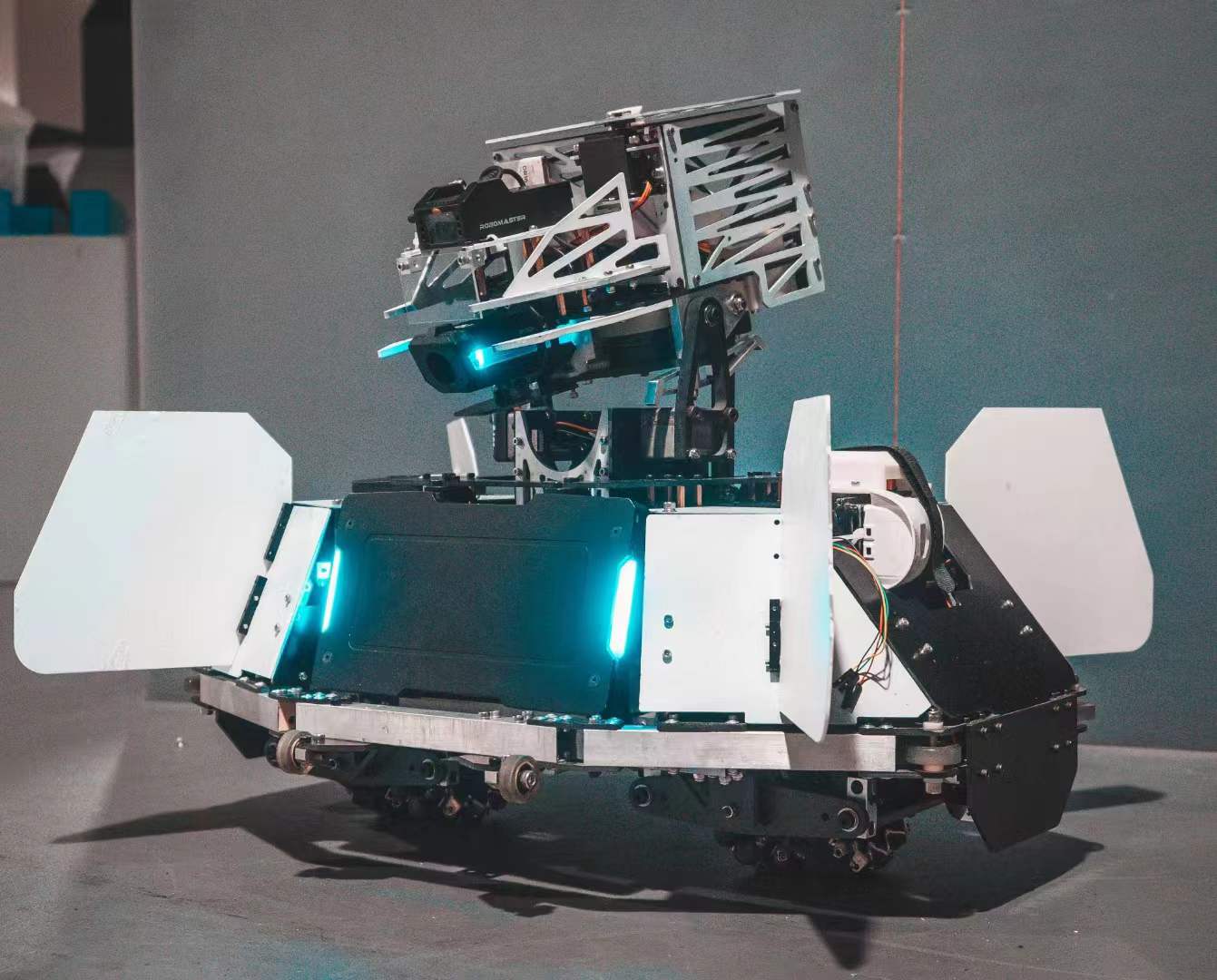
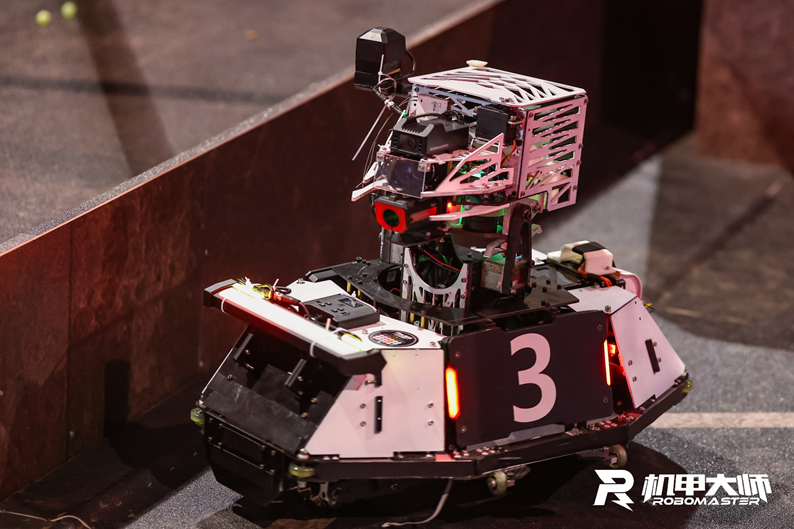
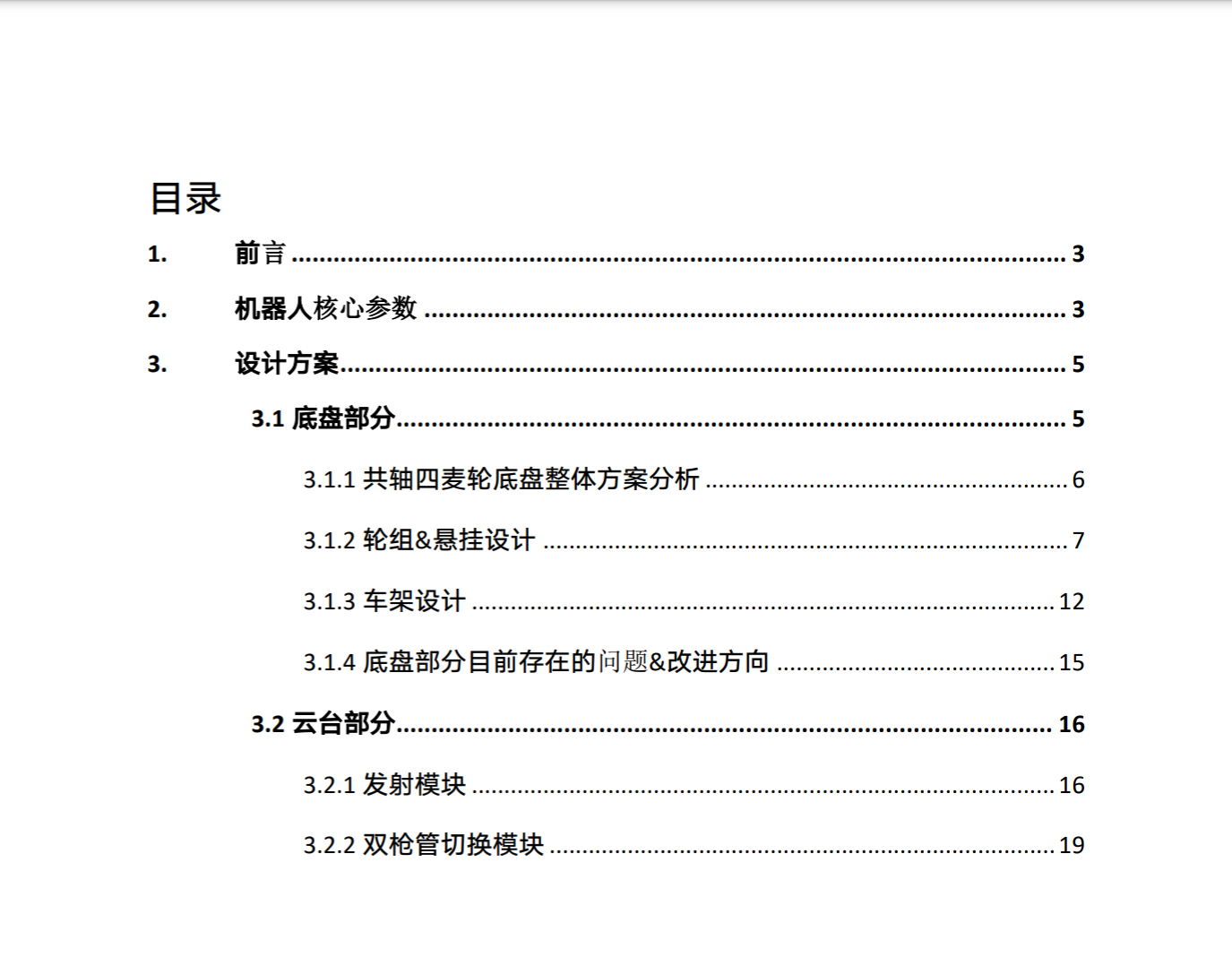
此机器人主要针对RoboMaster2022进行设计,针对对抗赛场地中的起伏路面,设计了一套用于共轴麦克纳姆轮底盘的自适应悬挂和减震系统,从而将电控调试难度降到最低。开源报告中将对主要设计点和设计思路进行详细讲解,希望能为其他参赛队伍的研发和优化提供参考,促进共轴麦轮在RM赛场上的应用与发展。
效果视频:
附件下载:
网盘链接(465M):https://pan.baidu.com/s/1lEDKHkb799OZLS-_TdMwxw 提取码:lkhz
附件内容说明:
1. 开源资料包含三个文件夹:三维模型,说明文档,效果展示。
2. “说明文档”中有“共轴麦轮平衡步兵技术报告”,详细介绍了机器人的技术特点。
3. “效果展示”中有“起伏路运动测试”“全向运动1”“全向运动2”等视频,展示共轴麦轮平衡步兵的实际运动效果。
4. “三维图纸”中有机器人模型文件。其中,总装配体为“平衡步兵总装V3.0”,内含图纸设计树,需要用SolidWorks2021及以上版本打开。若无合适版本的软件,可打开“平衡步兵总装V3.0.step”进行查看。
特别感谢:
1. 感谢上海交通大学交龙战队2020的步兵开源。其云台架设计,轮系设计,方管内嵌件设计为我的设计过程提供了很好的指导与参考。
1. 开源资料包含三个文件夹:三维模型,说明文档,效果展示。
2. “说明文档”中有“共轴麦轮平衡步兵技术报告”,详细介绍了机器人的技术特点。
3. “效果展示”中有“起伏路运动测试”“全向运动1”“全向运动2”等视频,展示共轴麦轮平衡步兵的实际运动效果。
4. “三维图纸”中有机器人模型文件。其中,总装配体为“平衡步兵总装V3.0”,内含图纸设计树,需要用SolidWorks2021及以上版本打开。若无合适版本的软件,可打开“平衡步兵总装V3.0.step”进行查看。
特别感谢:
1. 感谢上海交通大学交龙战队2020的步兵开源。其云台架设计,轮系设计,方管内嵌件设计为我的设计过程提供了很好的指导与参考。
注意事项:
1. 本开源仅限于Robomaster各参赛队之间交流使用,不允许用于任何商业用途。
2. 转载需注明作者出处,对非法转载者,作者保留采用法z律手段追究的权利。
3. 本开源的最终解释权为西交利物浦大学GMaster战队所有。


文章标签
请问这篇文章对你有用吗?
【RM2022-共轴麦轮平衡步兵开源】西交利物浦大学