【RM2024-轮腿平衡步兵机械开源】武汉工程大学
本帖最后由 Vash 于 2024-7-14 18:09 编辑
代码堆成屎山了,先开源结构吧,后续有空再整理
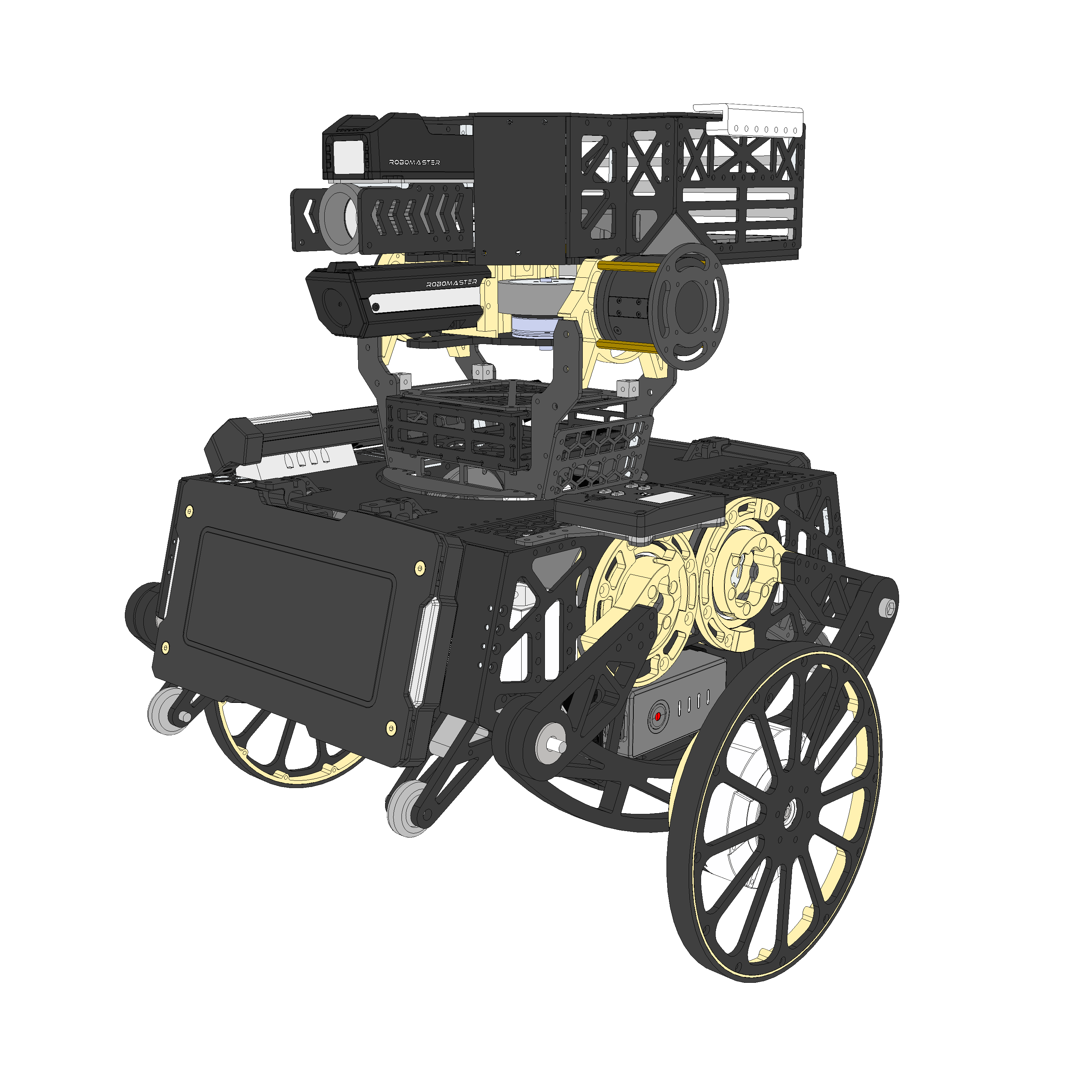
我的24赛季轮腿的主要设计目标是轻量化、小型化,能够稳定、快速通过24赛季的所有地形,在板凳的尺寸上做出轮腿的机动性。为此,在满足:低高度时腿部有较大活动角度、缩小机身高度、压缩横向宽度等条件下,缩短了腿部连杆尺寸并设计了大腿机加件做转接,对机身尺寸也进行了压缩,提高了空间利用率。
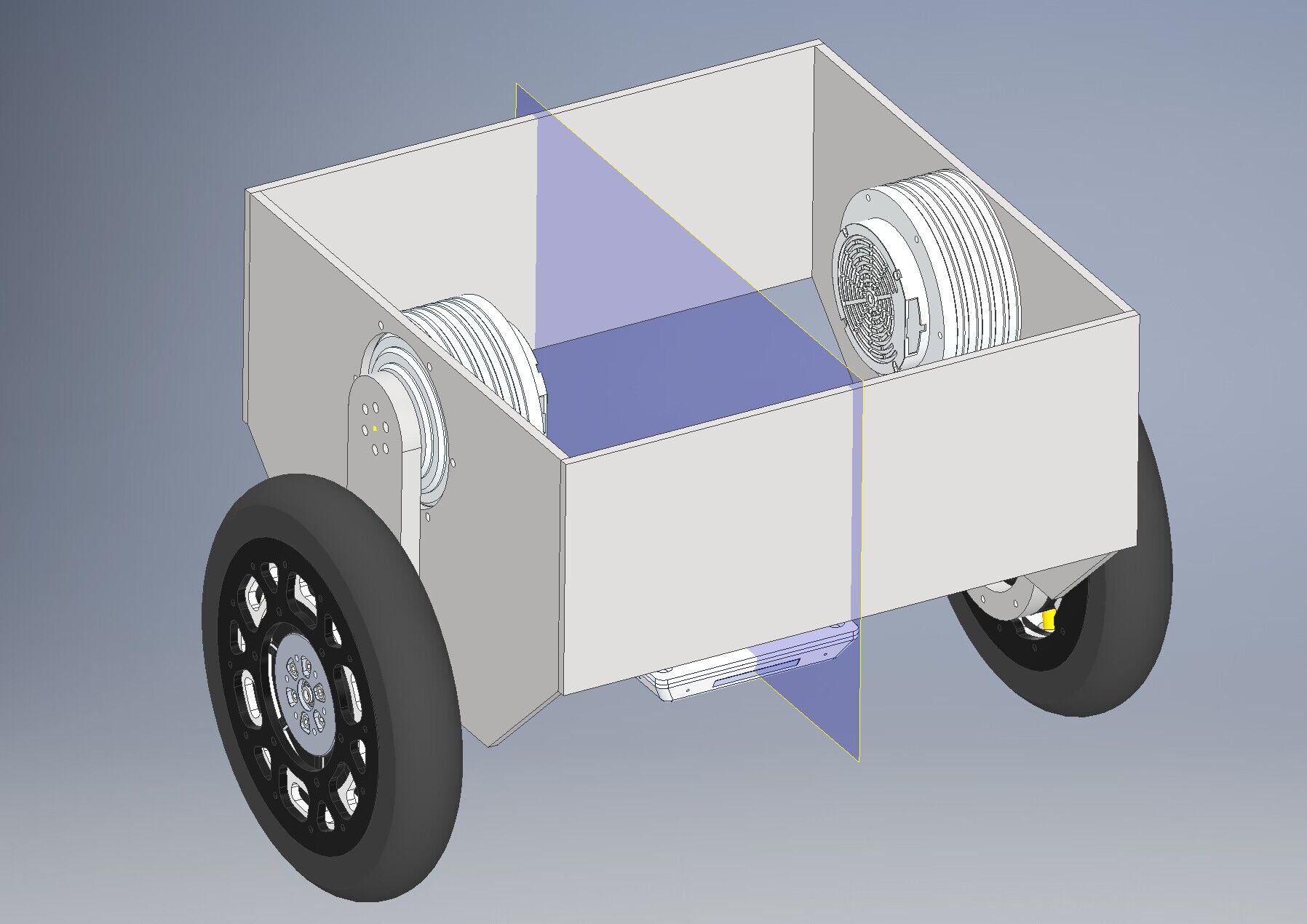
由于使用了宇树go1电机作为轮毂电机(便宜大碗),为满足速度上的需求轮子直径为200mm,后续再设计可考虑更换为XROLL的那款268/17减速比的3508减速箱,减小轮子直径,腿部结构整体下移,将关节电机放到机身下层,扩大上层空间用于安装半下供或者下供的云台。
缩小后的轮腿能够在降至最低高度时在狗洞内侧身/陀螺,正常运动时能击打贴脸的对手,跳跃高度可达30cm,分区赛检录重量18.4kg,血量优先时能够在场地中快速穿梭,基本上达到了设计目标。
关于上台阶:除了跳跃之外也可以通过伸长腿部撞击台阶的方式上台阶。我的方法是伸长腿部将机体抬升到一定高度后通过撞击台阶让机身产生一个倾角,此时大部分机身会进入台阶的上层,程序检测到机身的倾角后缩腿,将轮子也快速收到台阶上部,就完成了一次上台阶的操作。此方法正式比赛中成功率极高,相比于跳跃在触发时机上有更高的容错率,只要在碰到台阶之前完成抬升即可,甚至可以在侧身状态闭眼登上台阶,且由于整个过程不需要离地,也降低了翻车的风险。
运动效果见:场地训练 、适应性训练调试时间
(模型文件在最底下
欢迎交流+V:ljc_13627126189
—————————————————————————————————————————————————
2024.7.14 补充:如有用sw打不开的情况可以尝试下载评论区百度网盘链接的文件(用sw打开第一个附件之后进行了另存)


请问这篇文章对你有用吗?
【RM2024-轮腿平衡步兵机械开源】武汉工程大学