【RM2022-关于ADRC控制算法的程序开源】基于大疆A板
阿天
11058
2
9
2022-02-15
HELLO大家好,我是
来自沈阳理工大学
Ambition战队
电控组成员
花里胡哨的阿天
这次又来和大家来分享一下自己的程序和算法啦。
这分享的是关于ADRC控制算法的C语言实现。
开源的源头是最近一次和学弟聊天的时候发现的自己以前写的关于ADRC算法的一些测试程序。
程序是基于大疆A板写的,结构仍然是用了操作系统(操作系统这玩意用一次就爽的停不下来了:lol)
测试环境用的试6020云台电机的角度闭环空载测试,因为当时是在家里做的测试,没有条件让6020带负载去测试。
程序参考了各种CSDN上面的大佬以及韩京清教授写的《自抗扰控制技术》这本书。
测试过程中也发现ADRC相对PID来说还是复杂太多了,因为不是自控专业的学生研究起来还是倍感压力。
开源连接放在帖子的最后,下面是ADRC和PID的对比测试结果
先来看一下PID的测试结果
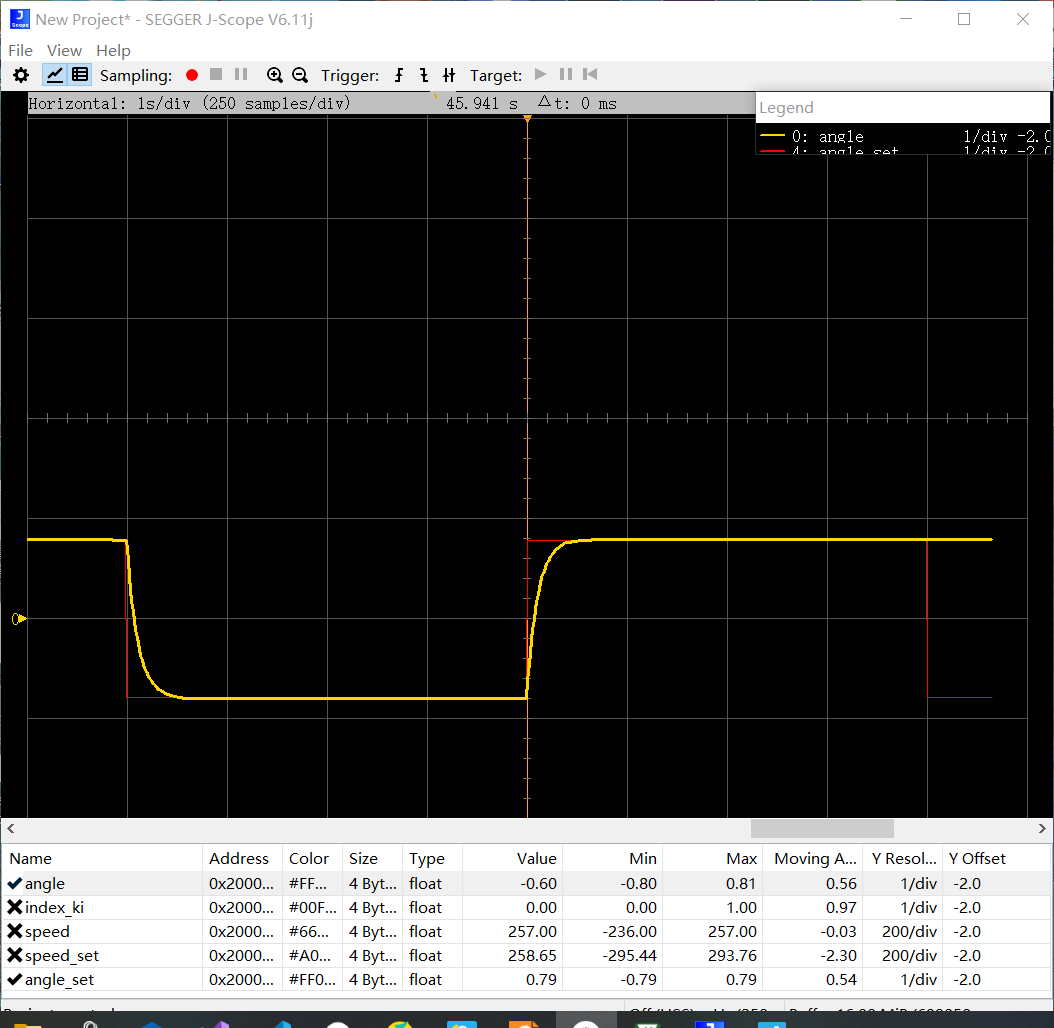
图片中红色是设定值,黄色是实际值。
下图是ADRC的测试结果。
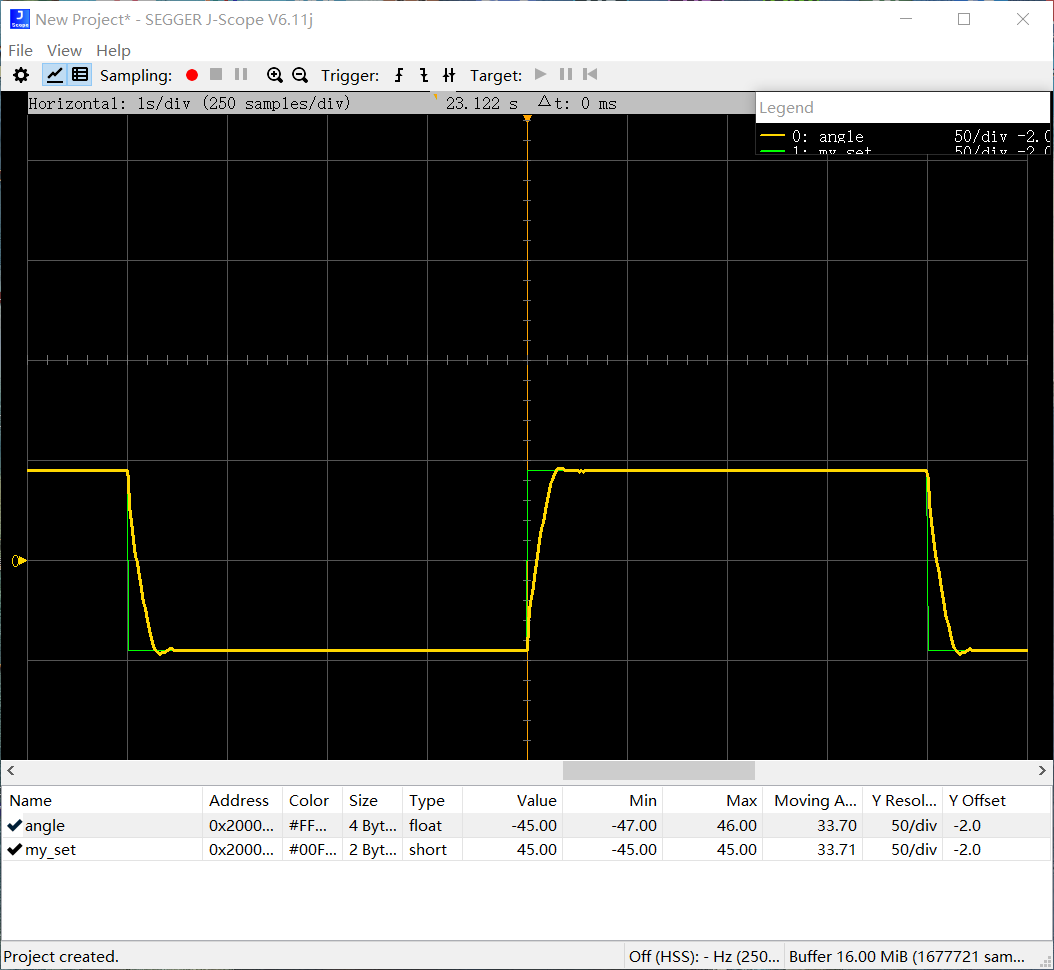
其中绿色是设定值黄色是实际值。
最后下面一张是通过PS合成的对比结果

总结一下ADRC参数实在太复杂,调参的最后还是有一点点超调的地方可能就是参数没调好,
相比较来说PID和ADRC在设定值跳变后,电机实际反应的前半段两者曲线几乎重合,ADRC在后半段上升稍微必PID快一些。
但是ADRC调参时候消耗的脑细胞,换来的性能提升确实有点微乎其微,也可能实我参数没调好导致的。
ADRC算法后来是被我搁置了,因为他的易用性远不如PID,电控萌新建议还是好好学好PID。
另外欢迎大佬一起,研究关于ADRC算法的细节。
本人实力有限只研究了这么多。
以下是开源连接,github又上不去了,先发个百度网盘的分享了。啥时候github上去了我再更新一下github连接
文章标签
请问这篇文章对你有用吗?
【RM2022-关于ADRC控制算法的程序开源】基于大疆A板