【交流帖】纠结在云台的参数调试
kdl511
8112
0
3
2018-03-17
新手处在备赛之中,其中云台Yaw轴的调试费了我很大的劲,但没解决好云台Yaw轴的问题。
目前我将云台的控制在双闭环PID中,外环是云台的欧拉角度,内环是云台的角速度。
云台的问题一:现在的云台摆动没力。目前来说,我们的云台速度环参数很小,所以没力。但我将速度环的P ,I,D任一个参数调大,云台一上电Yawz轴出现摇摆不停(震荡)的情况。
云台的问题二:步兵在底盘电机转动后,云台出现不能稳定自锁的情况,Yaw轴随意跟车摆动。
面对这两个问题,我们首先是把关于云台Yaw轴的PID逐一凭感觉调试,由外环的比例p,积分,微分,到内环逐一调试,但发觉时间周期长,效果不佳。
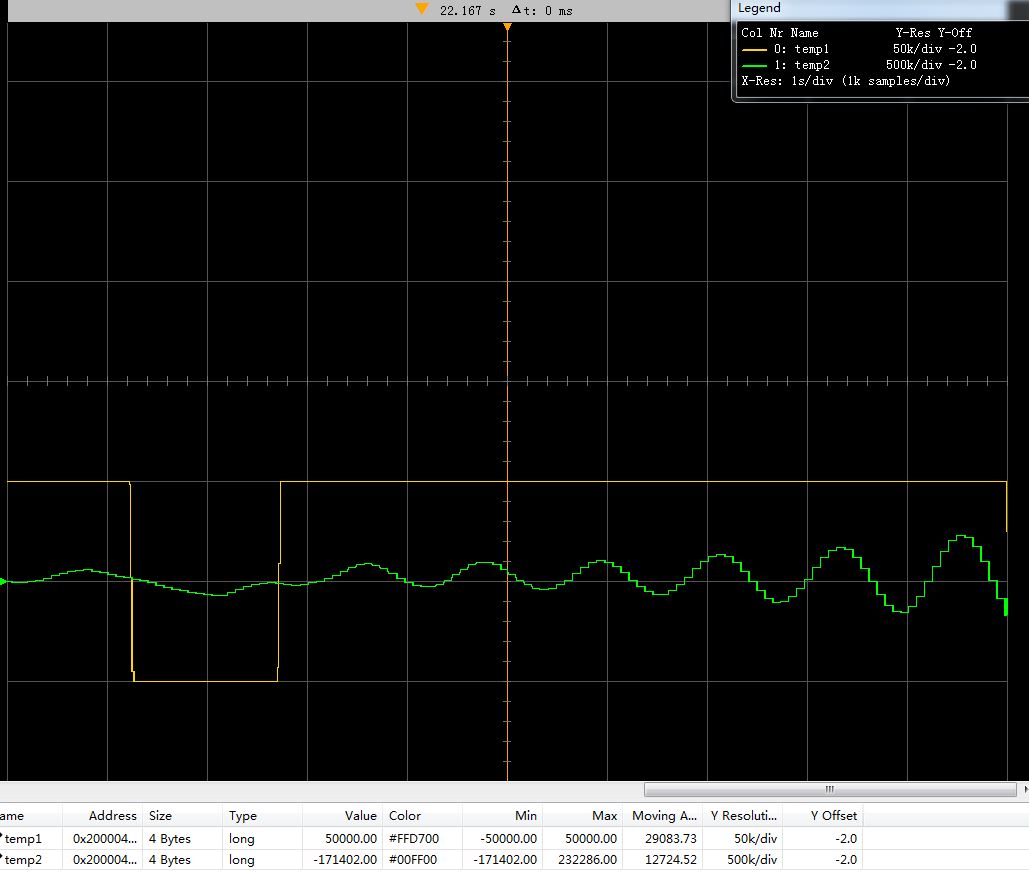
接着,我们仿照官方解决关于云台的问题进行研究,放下关于云台Yaw轴的内环PID的波形图,其中黄色线是给定值,绿色线是实际云台的关于绕Z轴角速度。
还有,我们也仿照官方导出了在matlab计算的Yaw轴的内环PID传递函数,但我们底子不好,看不到其中的含义:L,贴图。
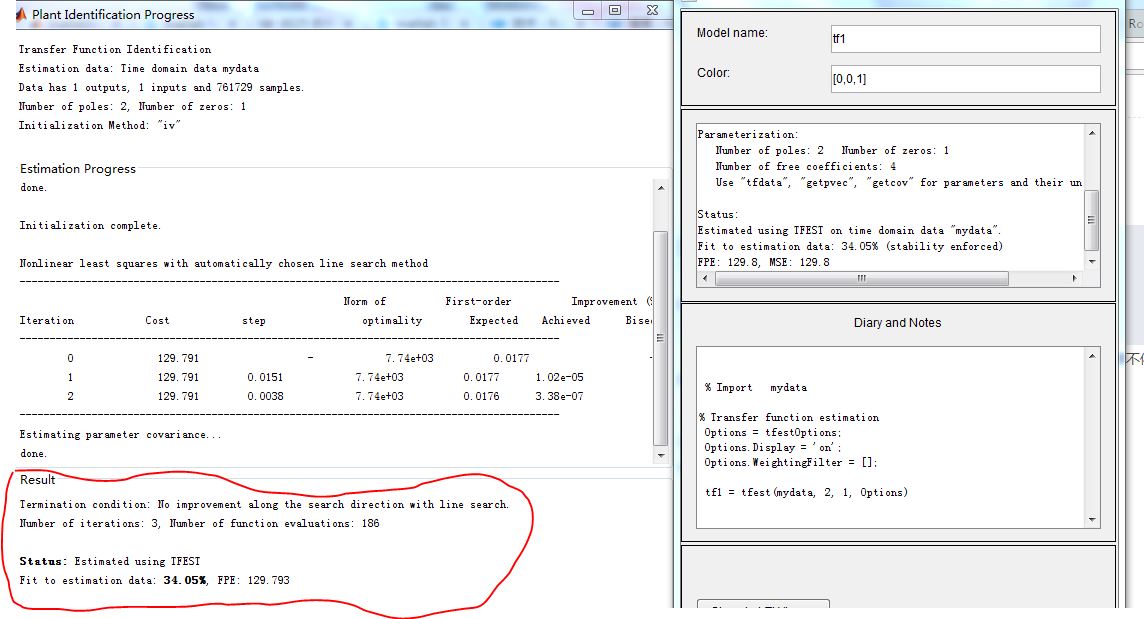
matlab导出的传递函数及其结果
在此,请各路大神申请你的大腿,让我们紧紧拥抱着。请大神指出我们这个问题的根本原因和提出你们的高见。谢谢:lol
文章标签
请问这篇文章对你有用吗?
【交流帖】纠结在云台的参数调试