【求助帖】云台初始化问题
8099
0
9
2019-03-04
我的想法就是让云台yaw轴上电初始化后就保持在当前的位置并锁死云台,不受外力影响保持不动。目前只是调一个yaw轴
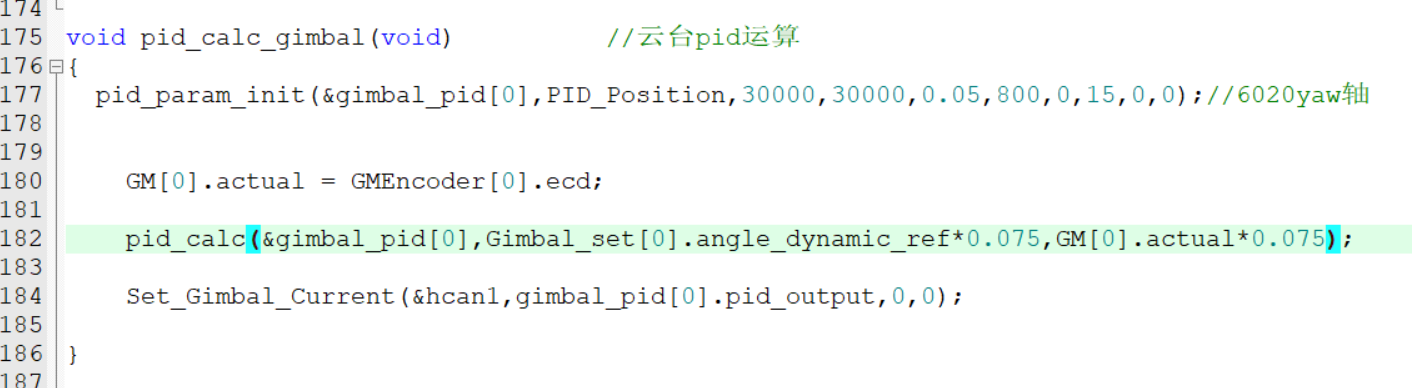
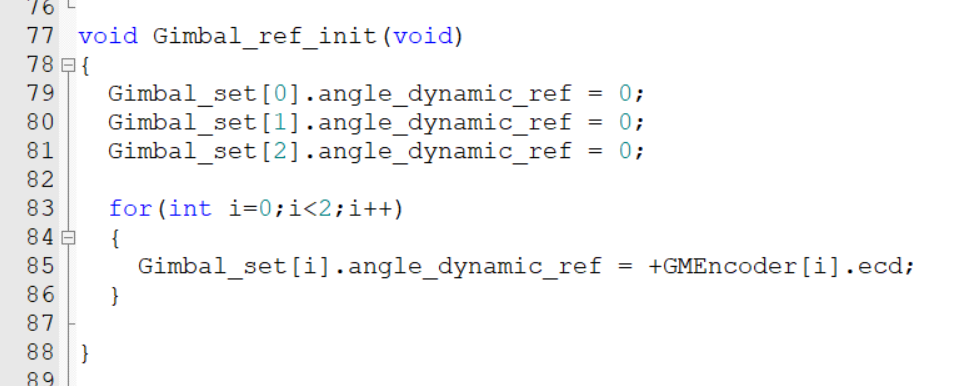
pid的目标值是上电时当前位置的编码器值(即转子机械角度值)乘以一个小于1的系数,
pid的实际值是电机编码器值(即转子机械角度值)乘以一个小于1的系数
实验现象:
当我用外力用手去转动6020电机使其逆时针转时,电机能够顺时针回到上电时初始位置;
但是当我用外力用手去转动6020电机使其顺时针转时,6020电机反而不会立即逆时针转回原来的位置,它是继续顺时针转一圈才回到原来的位置。
还有一个问题就是,如果我pid的目标值单纯是上电时当前位置的编码器值(即转子机械角度值),
pid的实际值单纯是电机编码器值(即转子机械角度值);它们都不乘以一个系数的话,再次运行代码,
电机就会顺时针不停的转。
请问能哪位大佬解释一下这是为什么吗?
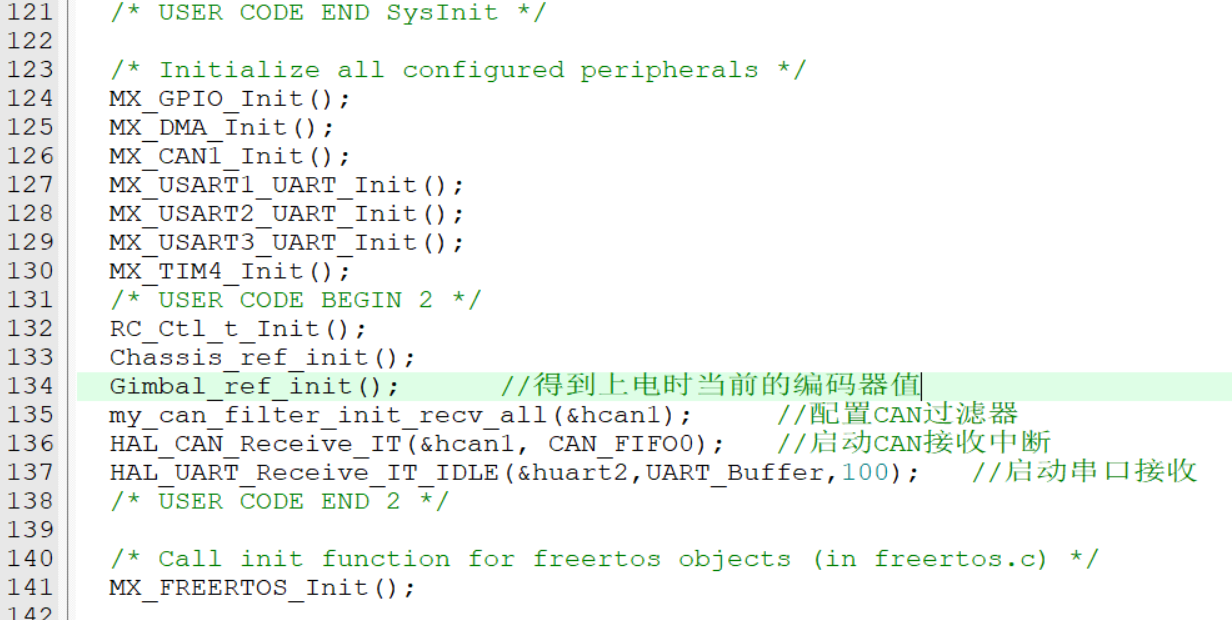
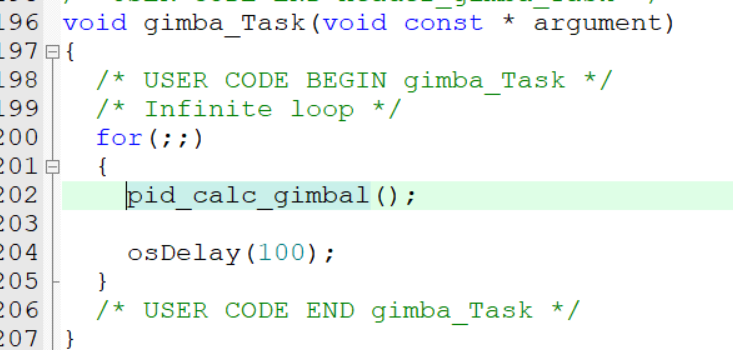
图片为代码部分,请大佬解答一下小弟的疑惑?
pid的目标值是上电时当前位置的编码器值(即转子机械角度值)乘以一个小于1的系数,
pid的实际值是电机编码器值(即转子机械角度值)乘以一个小于1的系数
实验现象:
当我用外力用手去转动6020电机使其逆时针转时,电机能够顺时针回到上电时初始位置;
但是当我用外力用手去转动6020电机使其顺时针转时,6020电机反而不会立即逆时针转回原来的位置,它是继续顺时针转一圈才回到原来的位置。
还有一个问题就是,如果我pid的目标值单纯是上电时当前位置的编码器值(即转子机械角度值),
pid的实际值单纯是电机编码器值(即转子机械角度值);它们都不乘以一个系数的话,再次运行代码,
电机就会顺时针不停的转。
请问能哪位大佬解释一下这是为什么吗?
图片为代码部分,请大佬解答一下小弟的疑惑?
文章标签
请问这篇文章对你有用吗?
【求助帖】云台初始化问题