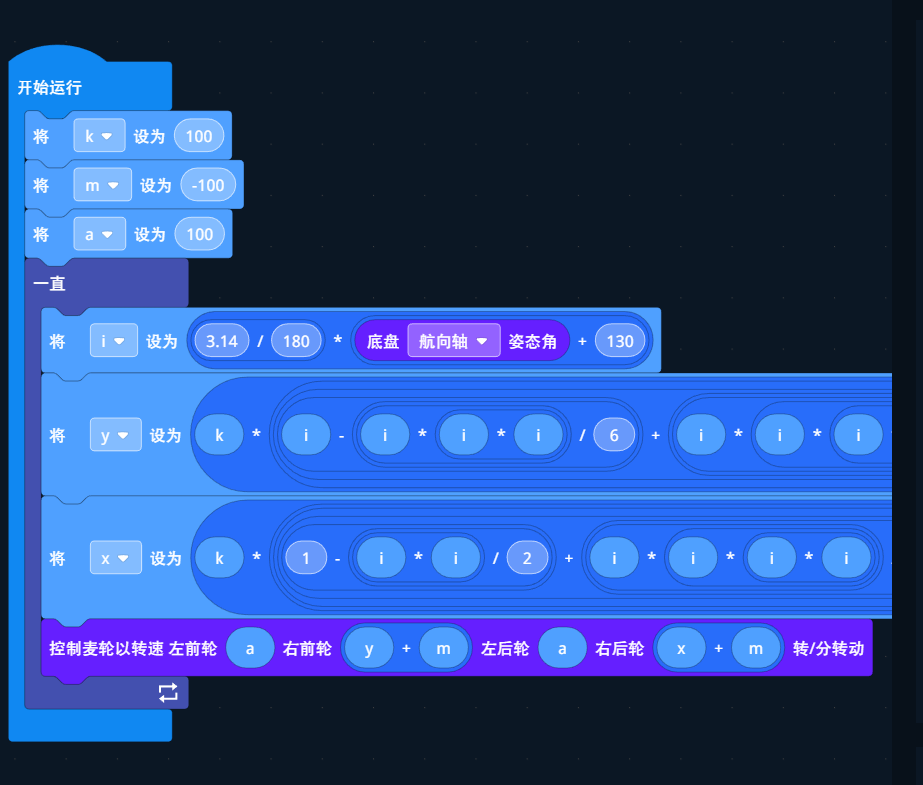
【分享帖】开源S1移动小陀螺算法.附动态效果图和代码 27246 0 17 2019-08-06 k×的是三角函数的泰勒级数展开 文章标签 历史数据/历史数据 请问这篇文章对你有用吗? 【分享帖】开源S1移动小陀螺算法.附动态效果图和代码