【RM2018 哨兵机器人规则解读】
勺子酱
16308
0
36
2018-01-10
现在是公元2018年1月9日,据前线记者赛务二哥、萝卜君和小白君的跟踪,大批RoboMaster前线战斗人员(简称“萝卜”)即将结束每半年灾难季,抛却撩人的期末考,准备进入RoboMaster2018寒冬备战。
辣么,此时问题来了?你们真的认真研读规则?洞悉了规则背后的玄机了么?入集中研发制作及迭代的阶段,规则的剖析及机器人的定位分析是至为重要。明确了每个机器人的功能及设计定位,并且也制定了对应的研发规划和人员分工,可以大为提高备赛的效率和产出。
BTW,貌似大伙在团队管理、队伍传承、研发流程等都存在不少困惑。辣么,勺子姐也会总结了相关的干货!
通过跟规则研发小组的密切交流以及内部机器人研发测试的情况,勺子总结了一些有关机器人方面的规则解读,会陆续更贴发布,仅供各位大佬们交流参考!
今天就先讲讲哨兵机器人吧。
RM2018的参赛机器人阵容中,除了有大家熟悉的步兵、英雄、空中机器人等之外,还有一个全新的角色:哨兵机器人(简称“哨兵”)。
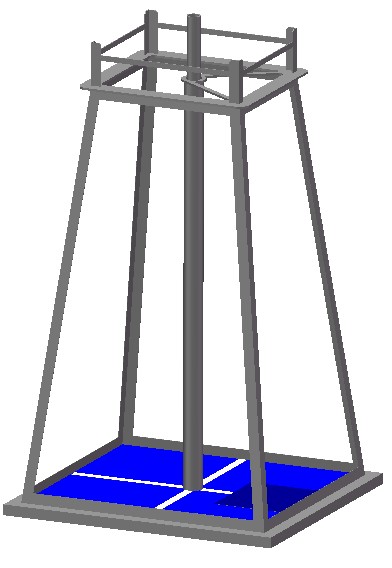
说起哨兵,对RM比赛关注比较久的萝卜肯定会联想到2015年比赛中也有一个叫做哨兵的角色。RM2015登场的哨兵是参赛队自制的全自动机器人,用来攀登瞭望塔,完成现场侦察任务。哨兵上安装高清图传模块,以便获取图像并将其传送到操作间的显示器上。它不能携带任何弹丸,也无法被攻击。简单来说,哨兵的功能就是爬杆,然后为操作手提供全场视野。
RM2015的瞭望塔如下:
RM2016和2017年的比赛中全自动运行的机器人是基地机器人,它可以预先装载200发17mm弹丸,对敌方机器人进行全自动地反击。但是基地的运行范围局限于基地区,处于被动防守。
今年来,人工智能的话题被炒得越来越火,与此同时人工智能方面的产品及招聘岗位都大为火热。为了提高比赛的自动化程度,鼓励萝卜们使用计算机视觉等方面的知识。RM2018的比赛规则中重新引入了哨兵这一元素。今年的哨兵与往年相比是完全不同的设计:它在安置在启动区外的哨兵轨道上运行,行动更加灵活,打击范围也更广;哨兵初始装填500发17mm弹丸,;哨兵存活时基地还会获得50%的防御加成。综合来看,哨兵机器人可以简单理解为“移动的防御塔”。


RM2015-2018哨兵变化
时间 | 名称 | 运行范围 | 弹丸发射 | 传输图像 | 增益效果 |
RM2015 | 哨兵 | 瞭望塔 | 否 | 是 | 否 |
RM2016 | 基地 | 基地区 | 每局200发17mm弹丸 | 否 | 否 |
RM2017 | 基地 | 基地区 | 每局200发17mm弹丸 | 否 | 否 |
RM2018 | 哨兵 | 哨兵轨道 | 每局500发17mm弹丸 | 否 | 哨兵存活时,基地拥有50%防御加成 |
1.规则限制
1.1运动方式
规则中对于哨兵有如下描述:比赛开始前,哨兵机器人可挂载在哨兵轨道上,比赛开始后哨兵机器人可自行移动或静止在轨道上对敌方进行全自动攻击。
哨兵的活动区域是哨兵轨道,比赛中,当哨兵机器人脱离了哨兵轨道后,会被判罚三级警告。
比赛前的三分钟准备阶段即可开始移动,3分钟准备阶段不得发射弹丸,如果发射的弹丸造成现场人员受伤,将被视为犯规判罚一级警告。比赛正式开始后才可以发射弹丸。
由此我们提取的信息:
1.哨兵要求全自动运行,不可以直接接受遥控信息,这也是本届比赛中唯一一台要求全自动运行的机器人。但是没有限制WIFI通信。可以由其他机器人给他发送指令。
2.哨兵可以选择静止或者在轨道上移动。
3.哨兵必须在轨道上运行,离了哨兵轨道后,会被直接罚下。
4.哨兵战亡后,基地机器人的50%防御加成自动消除。
1.2 弹丸限制
如下是规则中关于哨兵的弹丸限制部分:
项目 | 限制 |
发射机构类型 | 17mm弹丸 |
初始弹量 | 500 |
能否补弹 | 能接受,不能给予 |
弹丸发射速度上限(米 /秒) | 30 |
枪口热量上限 | 4500 |
每秒热量冷却值 | 1500 |
哨兵机器人在每局的3分钟准备时间内可以预装500发17mm弹丸,相比步兵,这个弹丸数量可以说是非常多了,萝卜们一定要充分利用好。
有人可能会想,500发17mm弹丸在一局比赛可能用不完,那能不能把子弹丢给步兵小弟去使用呢?然而我们的规则对此作了限制“能接受,不能给予”,大家就别想那些骚套路了!哈哈哈哈……
枪口热量上限4500,每秒热量冷却值1500,这是个什么概念呢?对比一下步兵机器人我们就可以看出,这个限制已经超过升级后的步兵了。
二级及三级步兵机器人的热量相关值:
机器人等级 | 枪口热量上限 | 每秒热量冷却值 |
二级步兵 | 3000 | 1000 |
三级步兵 | 6000 | 1500 |
换句话话说,在比赛刚开始的阶段内,哨兵就具备巨大的火力优势,此时步兵是无法与哨兵抗衡。
1.3其他限制
哨兵是可以被攻击而扣血的,因此对装甲板的安装也有了一定的限制,这里就请萝卜们仔细阅读《RM2018裁判系统规范手册》中关于装甲板安装的要求,防止出现无法通过检录的情况。参赛队伍可以自行搭建无线网络传输数据,用于机器人之间的通信或为操作手显示数据,但是不能传输摄像头图像。所以今年的哨兵无法像2015年的哨兵一样为操作手提供额外的视野。
通道门:RM2018裁判系统规范手册v1.0发布(2017.1.8)
2. 功能看点
2.1 自动反击
由运行位置和子弹数量,大家很自然地想到哨兵最大的功能就是自动反击。相比前两届比赛中的基地,哨兵的运行范围更加自由,装载的17mm弹丸数量更多,因此哨兵射击的范围很广,攻击策略也可以更加主动。
假设哨兵的有效射程为5m,不考虑两端的死角的情况下,火力覆盖范围大致如下所示:
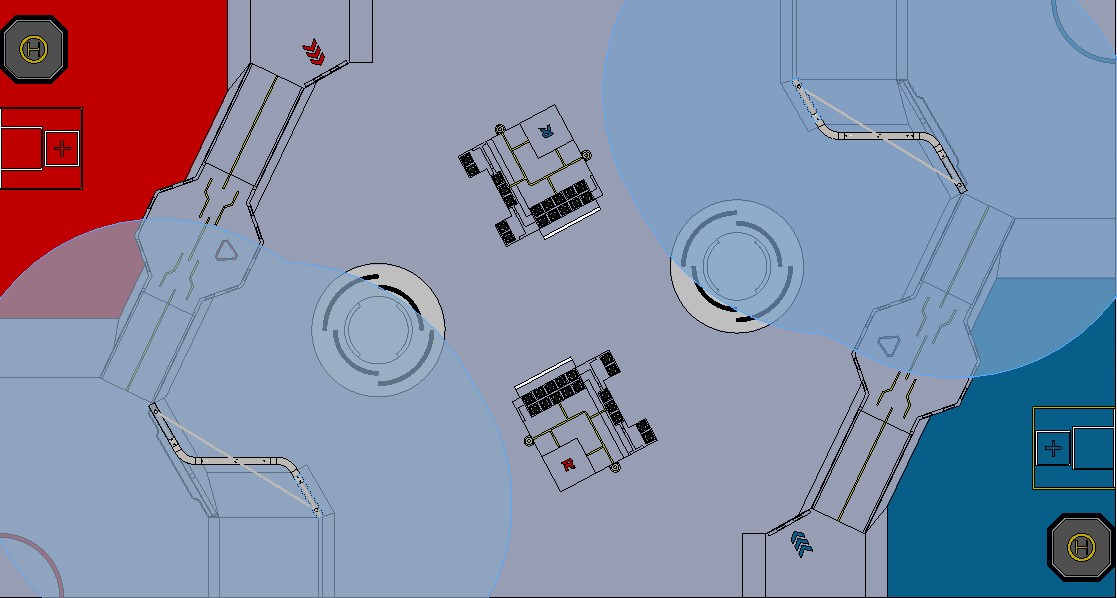
由上图可以看出,对外,哨兵可以打击碉堡和桥头的全部范围,进入启动区的两处通道也在覆盖范围之内,此外,哨兵还可以攻击打算登岛的英雄或者工程机器人;对内,火力可以完全覆盖启动区,因此可以对我方基地进行有效的保护。
规则中有如下描述:每局比赛一开始,基地有50%防御加成,当己方哨兵机器人被击毁,则该防御力自动消除。
这就是说哨兵不能无脑与敌方硬怼,一旦自己挂掉,不仅失去了反击功能,还会让基地失去防御加成。因此在运行时躲避敌方攻击也是一项非常重要的功能。
2.3 组网
2.3 组网
RM2018的比赛规则中对无线网络规范做出了具体的要求,并且开放了5.8GHz频段,这既是限制,也在暗示今年可能会有更多的参赛队伍使用无线网络进行机器人、操作手之间的通信。作为一台完全自主运行的机器人,哨兵可以通过无线网络将场地、敌方等信息传输给其他机器人,或者直接发送给操作间的接收设备,真正发挥出哨兵的“侦察”功能。由于空中机器人的云台手有全场最佳的视野,可以通过在空中机器人与哨兵机器人都安装WIFI收发装置,使得哨兵能够接收来自空中机器人云台手的指令。
3. 设计思考点
哨兵作为新加入的元素,可以自由发挥的空间很大,在功能实现上也存在不少挑战,从以下几个方面给萝卜们提出一些值得思考的问题,供大家交流参考!
3.1 运动
由前两届RM比赛可以很明显地看出,在基地区自由运行的基地远远强于静止不动的基地,一方面是可以躲避敌方攻击,同时也可以更加有效地进行反击。
同样地,哨兵想要达到较好的效果得能够动起来,这样才能更加灵活的躲避敌方攻击。
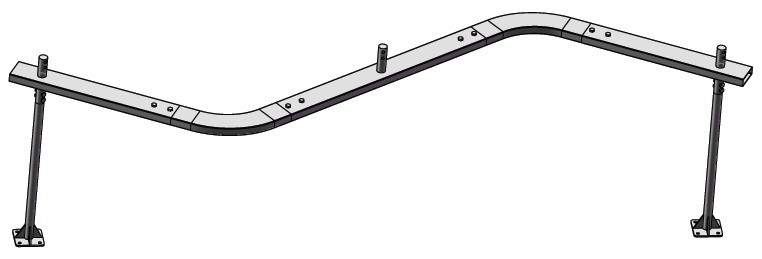
由于哨兵轨道的表面是经过哑光烤漆处理的金属,表面不光滑,因此建议使用轴承或者轮子来减小摩擦力。同时为了保证哨兵能够稳定沿着轨道运行,使哨兵稳固地挂载在轨道,应该考虑限位装置。例如弹簧压力夹使哨兵挂载在轨道,弹丸压力夹在哨兵运动的过程可以根据轨道的宽度及角度进行相应的调整。参考如下:
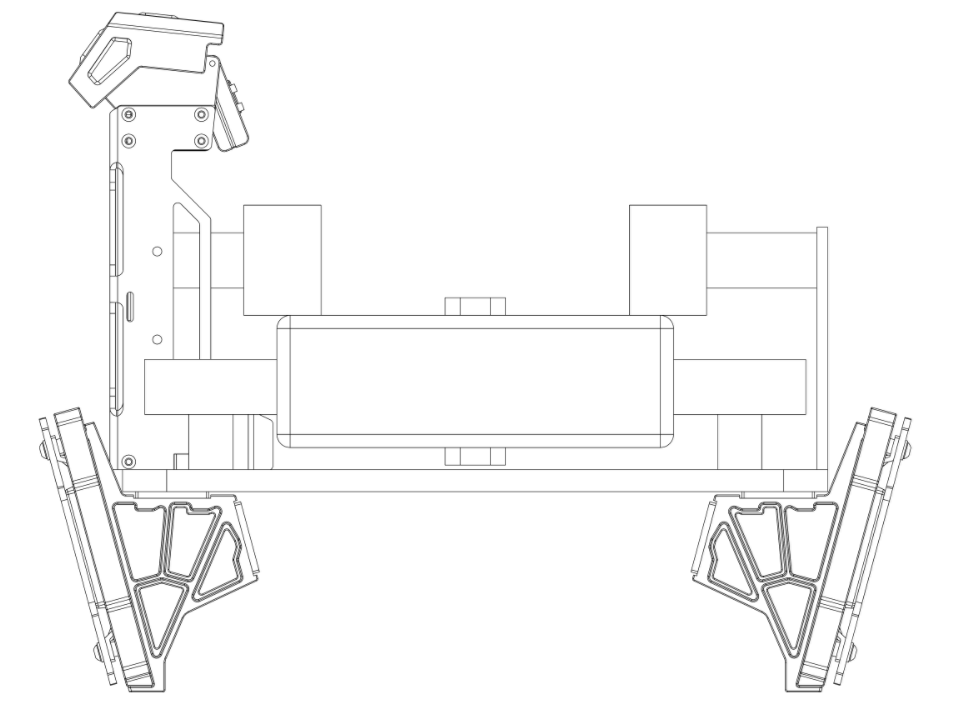
在轨道的直线部分运动不是难事,但是想要射击范围更广,就要通过轨道上的弯道到达两端。为了方便过弯,最好可以让驱动轮和限位装置可以在一定范围内调整角度,当采用两边摩擦轮作为动力的机构时,要考虑过弯时两个轮子的差速问题,可以参照汽车的差速器。
由于哨兵的射击范围广,17mm弹丸数量多,对发射机构提出了新的要求。
首先是弹道,以前的比赛中,步兵的普遍射击距离较短,大都在3米内的范围内互相射击,甚至是贴着脸的“肉搏”。在这样的近距离情况下,弹道的偏差造成的影响很难被察觉到,一旦目标变远了,弹丸的射击精度就会严重下降。
由于哨兵的运行范围有限,想要发挥出更大的作用,必须要求射击范围足够大。如图所示,在场地图中标注了哨兵轨道与一些关键位置的距离。
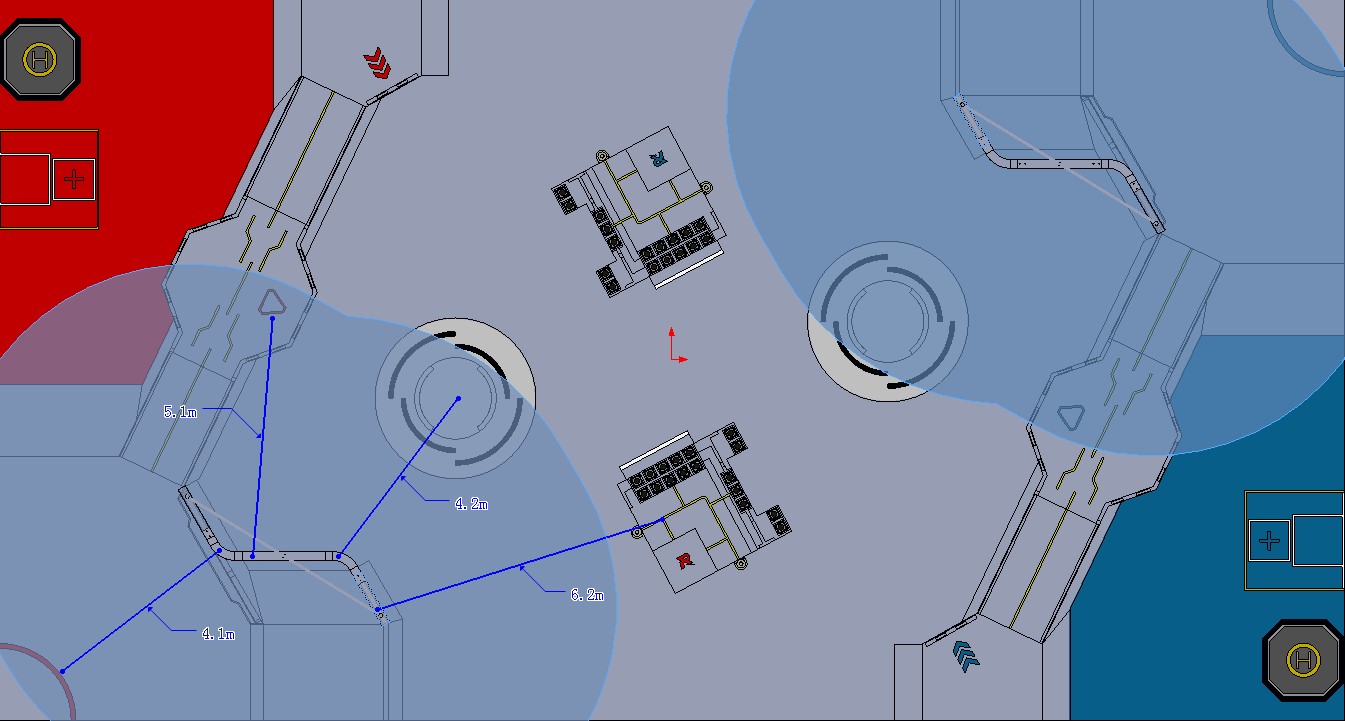
例如从哨兵轨道的中间位置到桥头大概有5米多,距离资源岛上的英雄或者工程机器人更是超过了6米,这些位置的距离都远大于传统的步兵射击范围,如果不对发射机构做出改进,哨兵将难以胜任这些关键点的火力覆盖。
哨兵最多可以装载500发17mm弹丸,这个数量远远超过一般的步兵载弹量,如果使用传统的云台弹仓一体式的方案,极有可能造成云台负载过大,无法稳定运行。分离式弹仓或者多级弹仓可能是更好的方案。
想要做到里外兼顾,需要云台的转动角度足够大,传统的双轴云台肯定是无法做到的,大家可以借鉴今年RM2017比赛中那些云台可以360°旋转的基地。
另一方面不同于RM2016-2017的基地机器人,攻击目标基本上都在同一高度上。而对于哨兵而言,桥上,荒地,启动区的机器人高度距离都各不相同,需要详尽分析在不同位置需要攻击的目标位置,进而确定机器人俯仰角。
今年的比赛规则放宽了弹丸射击的限制(参见枪口热量文章),使得机器人发射弹丸有了更加灵活的选择,为了兼顾远程和近距离射击,可以考虑采用不同的策略进行应对,这就需要哨兵的发射机构可以调整射速射频。
哨兵想做到能跑能打,还需要一双眼睛去识别。经过两年的比赛,装甲板检测的算法已经比较成熟。精力有限的萝卜们可以直接套用往届比赛中基地的视觉识别方案,这对于较近距离的敌对目标就可以达到较好的反击效果了。
如果萝卜们想用哨兵去打6米之外的资源岛上的目标,需要考虑的东西就复杂许多。
首先,想要识别远距离的目标可不是那么简单,远处的目标在普通相机眼中成像太小,特征不够明显,导致识别准确率降低。使用长焦镜头可以看清楚远方,但是由此带来的视角狭窄也是需要考虑的弊端。多个相机可以弥补短板,但是运算性能和画面切换需要进一步测试。此外,相机是安装位置(底座还是枪口)也是值得思考的问题。另一方面机器人视角的死角也是非常严峻的问题,当敌方机器人跑到哨兵机器人的正下方后,机器人还能不能正确的检测,以怎样的策略来应对各种死角。
最后,由于射程较远,弹丸在运行中的受重力下落的距离也是需要考虑的,需要动态的实现弹道修正。由于今年需要攻击的目标的高度各不相同,之前很多萝卜们都是在同一个高度通过测试来进行归零点的调节,今年则需要更加复杂的模型来描述机器人的落点,总之,想要实现远距离的识别和打击,对哨兵的视觉系统提出了较高的要求。详细关于自动射击方案的分析,后续文章再进行详细分析。
在保证哨兵能跑、能打、能识别敌人之后,用什么样的策略让哨兵运行起来咧?
最简单的实现方式就是在哨兵的两端加入避障功能,哨兵在轨道上往复运动,遭到打击就随机运动;云台按照一定规律扫描,让相机尽可能的遍历所有的角度。这就类似于前两年比赛中的基地,虽然功能简单,但是可以取得较好的防御效果。
由于场地中存在许多有特殊作用的位置,例如资源岛、碉堡、基地,如果有敌方机器人进入该区域,造成的威胁远大于在场地其他位置的目标。如果哨兵可以有针对性的去关注这些特殊位置,就可以在第一时间发现威胁最大的目标并进行攻击。可以利用哨兵自身位置和相机角度确定瞄准的位置,然后提前标定好几个特殊区域,在后续的扫描中增加这些位置的权重;还可以利用视觉特征来识别这些位置。
俗话说,知彼知己,百战不殆。如果想要哨兵更加智能地运行,首先需要知道自身的信息。上面提到的利用相机的位置和角度来确定目标的大概位置,这就需要哨兵获取自身精确的位置信息,可以考虑加装编码器、光电传感器等设备对哨兵进行定位,还可以使用裁判系统的UWB定位数据作为参考。通过裁判系统还可以获取弹丸发射、血量等信息,这些都是可以被利用的信息,值得各位萝卜们去发掘。
在获取到足够信息之后,需要从运动和射击两个角度去规划哨兵机器人。怎么尽可能快速地发现敌人,如何选取威胁最大的目标进行打击,如何在进行反击的同时还能保证自身安全,诸如此类的问题都需要大伙们好好地思考。
上文提到的哨兵通过自组网可以与其他机器人进行通信,还可以将信息回传给操作手。如果可以充分利用这个通信链路获取更多的比赛信息,将具有重要的战略意义。例如,报告启动区附近的信息,如果有敌人就可以尽快回防;配合英雄、步兵围剿敌方机器人。
风险与收益并存,作为一个全新加入的角色,同时要求全自动运行,哨兵可以实现的功能非常丰富,如何做出取舍,发挥哨兵的重要作用,需要所有的萝卜们仔细的思考和测试。期待RM2018的赛场上能够看到让人眼前一亮的设计。
RoboMaster2018哨兵机器人规则解读v1.0(1月10日).pdf
文章标签
请问这篇文章对你有用吗?
【RM2018 哨兵机器人规则解读】